Paso 1: diseño
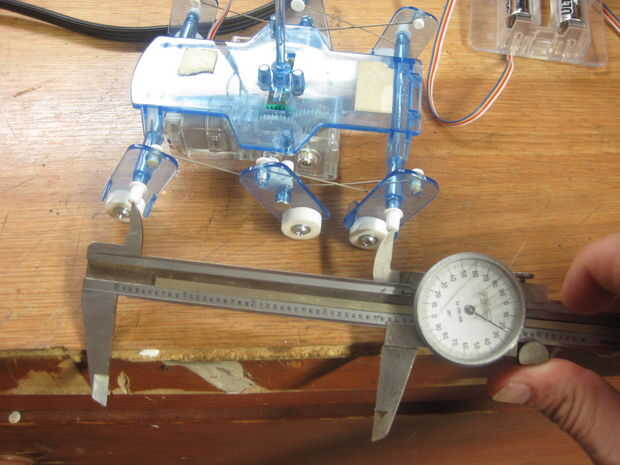
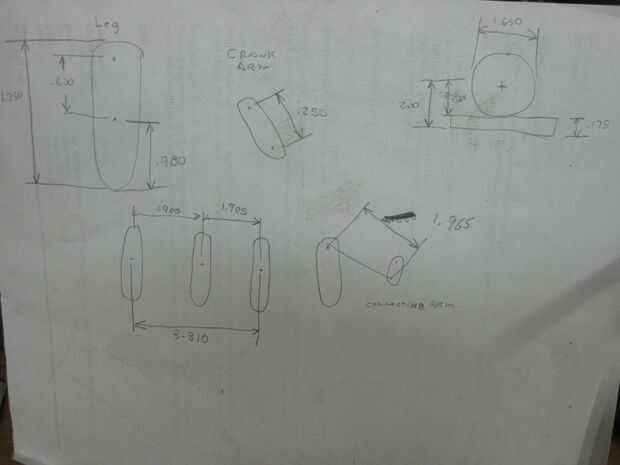
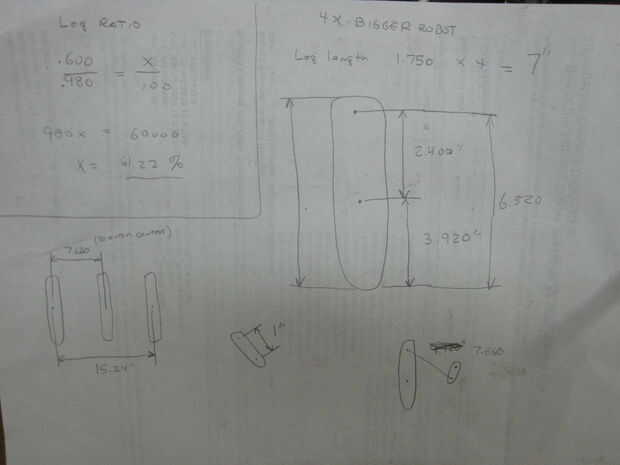
Así que lo que hice es - lo mejor posible, usando un par de disco pinzas – fue medir todas las longitudes de todos los componentes. Entonces medí todos otra vez, entonces medí les todo otra vez. Mis medidas creo que están cercanas pero no es 100% exacta. Desde que era balling ojo algunos lo que hice es tomar dos o tres medidas del mismo elemento y un promedio de las longitudes. Algunas de las medidas más fáciles que hice varias veces terminé con la misma distancia. Para todo lo que estaba, me preguntaba qué sucedería cuando multiplique la inexactitud – enlazar las piernas, caen o no andar en todo.










")


