Paso 4: Planificador de misión y parámetros


Descargar el archivo MSI de planificador de misión (MP) o ZIP de http://ardupilot.com/downloads/?category=4 e instalar el programa. Este programa se utilizará para cargar el firmware en la APM y la pantalla principal puede verse en la primera imagen.
Nota: Es sólo para sistemas Windows.
Una vez instalado el programa, conectar el APM al ordenador mediante el cable USB que vino con él. Haga clic en el ArduRover v2.42 (o cualquiera que sea la versión es la más reciente en que lees este Instructable) icono y cargará el firmware a la APM. Si no lo hace, es probable que su ordenador no reconoce el APM. Instalar a los controladores USB desde el mismo sitio de que tienes lo MP e intente nuevamente después.
Cuando se carga el firmware correctamente, debe conectar a la APM por el planificador. Esto puede hacerse ya sea por mantener enchufado mediante el cable USB o mediante el módulo de telemetría y la conexión a través de eso. Asegúrese de seleccionar el puerto COM adecuado independientemente en la parte superior derecha del panel de administración, deje la velocidad en baudios tasa a 115200 y haga clic en conectar. Al principio, probablemente buscará MavLink mensajes y luego comenzará a cargar los parámetros.
A la izquierda del panel de administración, deberá hacer clic en "Parámetros estándar" y luego el reloj en ArduRover Pids. Ver la segunda imagen de los valores utilizados en mi carro. Funciona bastante bien y debe darle un comienzo aunque probablemente tendrá que ajustar los parámetros a sí mismo más adelante si no son óptimos para su carro. Una vez que se han copiado los valores, asegúrese de hacer clic en "Escribir parámetros" en la parte inferior o guardará los parámetros comunes.
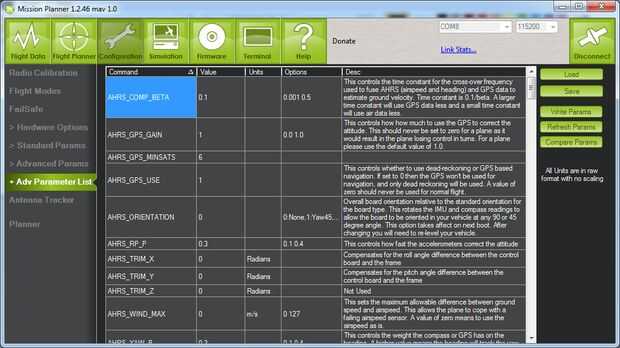
Para una explicación detallada de todos los parámetros que usted posiblemente puede ajustar, usted puede hacer clic en "Parámetros avanzados" de la izquierda, luego "Adv Parameter List" y luego verás las descripciones de las variables. Algunos pueden no tener descripciones pero el parámetro de nombre se le da una buena idea de su función.
Una vez que se establecen los parámetros, asegúrese de ejecutar la calibración de radio antes de hacer otra cosa y establecer los modos apropiados en el tercer canal en la radio.
Para otros detalles sobre configuración de MP, la guía APM:Rover hace un trabajo bastante bueno para lo básico va. Una vez más, que puede encontrarse en http://rover.ardupilot.com/ y es necesario hacer una calibración de radio como mínimo y luego configuras para ir.

")
")



")






