Paso 7: Añadir el interruptor y las piernas




Pasos:
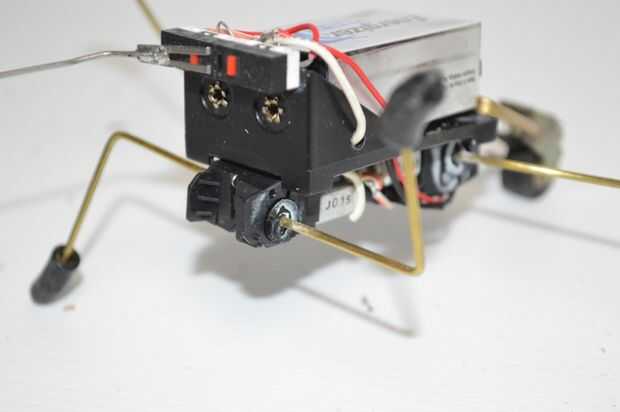
1. Coloque el interruptor en la parte posterior del soporte de la batería con algún pegamento.
2. soldadura de los cables del nuevo motor para el interruptor y el cable negativo.
3. Compruebe y asegúrese de que los motores están ejecutando la forma correcta!
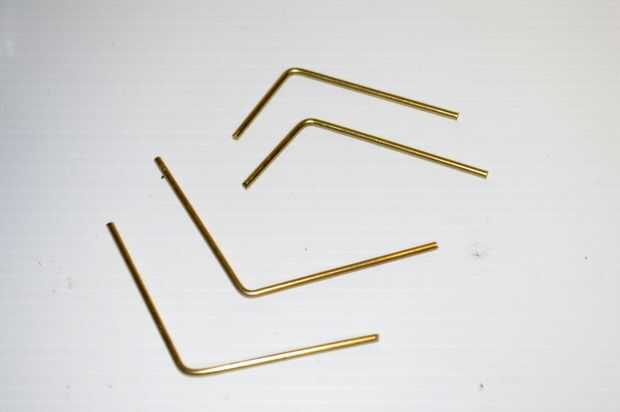
4. a continuación, la forma de las piernas. Se desea que las patas delanteras para tener hombros más estrechos como se muestra en las imágenes de abajo. Si no haces esto entonces las piernas serán simplemente mantener en golpeando unos a otros!
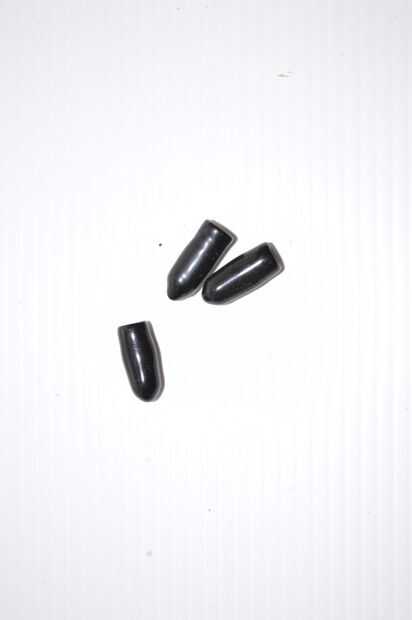
5. permitir a las piernas tener un agarre que utiliza unos pequeños tapones de goma que encontré en el extremo de algunos ganchos. Sabes los que tienen un par de clips en cada extremo y se utilizan para colgar pantalones. También podría añadir algunos encogible como como una alternativa. Doblar que los pies arena empuje en las tapas de goma pequeña.
6. antes de que del pegamento estupendo de la ONT patas los agujeros de los motores, asegúrese de que usted desbaste hasta los extremos con una Lima. Si no, entonces el pegamento tenga nada que agarra a y caerán finalmente las piernas.

")









")

")