Paso 12: Fórmula Allcode

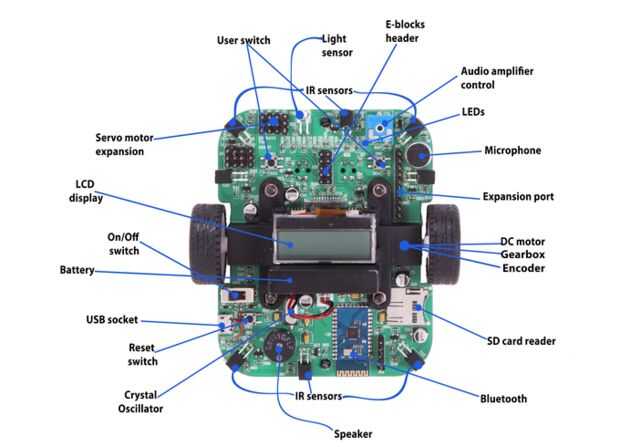



La fórmula AllCode fue diseñado y especificado por me y entonces los componentes por un equipo de ingenieros chinos para que conseguíamos buena relación calidad-precio. Es todo fuera de la caja que estaba en la Formula Flowcode así como una amplia gama de nuevas características al original le faltaba.
Aquí está una lista de las características que se agregaron al robot para tratar de hacerla tan flexible y robusto como sea posible.
- microcontrolador de 16 bits 70-MIPs dsPIC33
- Comunicaciones inalámbricas de Bluetooth reprogramación
- Batería de litio recargable USB
- 4 línea 40 pantalla de caracteres LCD monocromo retroiluminada
- Zócalo de la tarjeta micro SD
- 8 x LED de usuario
- 2 x usuario interruptores y botón de reinicio
- 8 x sensores de distancia IR
- 2 x siguiente línea sensores
- Sensor de luz
- Brújula y acelerómetro de 3 ejes digital
- Micrófono
- Altavoz controlado mediante PWM
- 4 x salidas motor servo
Motores con engranajes de metal integrado y codificador de alta resolución
- Puerto de expansión de los E-blocks - 8 x I/O + tierra
- 2 x cabeceras de extensión adicional
- Los agujeros de montaje para 3D impresión apariencias personalizadas y expansión mecánica
Apenas hemos comenzado una patada arranque campaña en el robot de fórmula AllCode así que si no te apetece diseñar tu propio robot de dos ruedas o simplemente quieres ver lo que somos entonces apreciamos mucho su apoyo.
Muchas gracias por la lectura.


 -")










