Paso 10: Con servomotores

Los servomotores son grandes que son muy baratos comprar en sitios como eBay, que no requieren un controlador de motor separado IC y también proporcionan un cociente del engranaje grande para generar un montón de esfuerzo de torsión para mover tu robot.
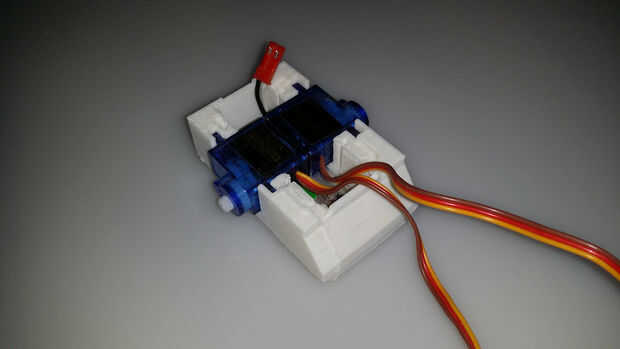
La imagen muestra un chasis diseñé usando Sketchup para albergar una LiPo a célula de la batería y dos modded mini torre servomotores pro.
El video muestra un hack motor servo que le permite convertir un servo motor para proporcionar control de velocidad en lugar de control del ángulo. Nota que este mod es un proceso unidireccional como tu ripeo esencialmente las piezas angulares retroalimentación fuera del motor. Esta técnica va a cambiar ligeramente dependiendo de sus motores específicos. Simplemente hacer una búsqueda en Google para su motor servo e incluyen los términos "rotación continua mod" o algo a lo largo de esas líneas. Nota: este no es mi video.
Para conducir el motor servo sería reemplazar los componentes de Flowcode PWM con un componente de controlador de servo y este componente entonces le permite conducir hasta 8 servomotores independientemente.
Motores paso a paso también pueden ser una buena opción pero pueden tender a ser un poco caro y hambre conseguir una buena mezcla de par y la velocidad de alimentación. Micro controladores paso a paso como el EasyDriver parecen funcionar muy bien para conducir a resoluciones muy precisas. Otra vez hay un componente de Flowcode disponible para conducir un paso a paso usando un conductor del motor de puente H dual.


 -")










