Paso 10: El brazo: la primera articulación



La primera articulación
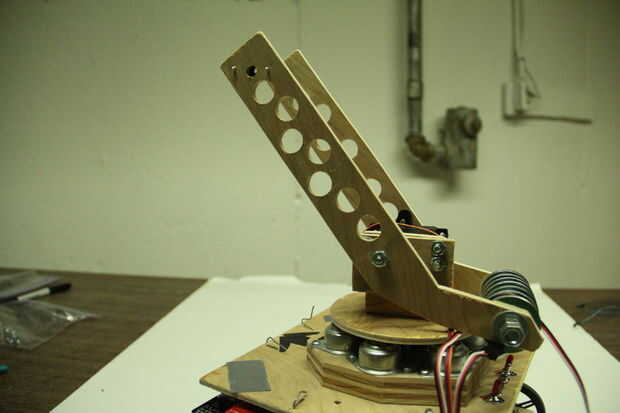
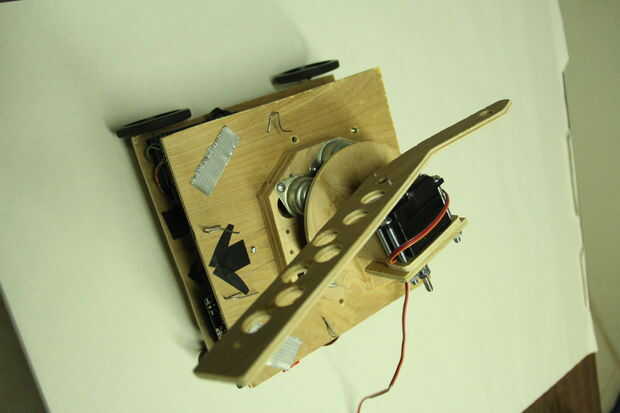
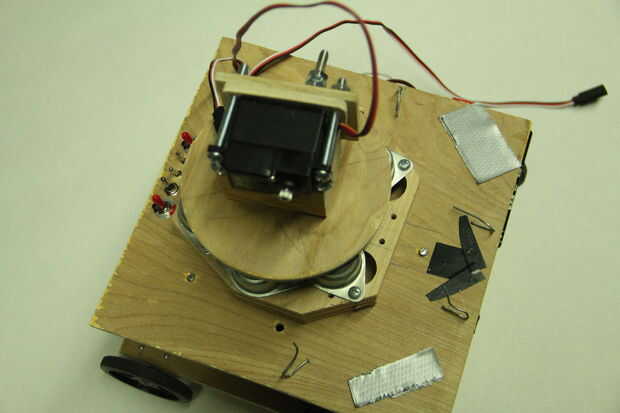
La siguiente parte fue la primer articulación del brazo. Lo diseñé mi brazo era que el conjunto servo montado en la plataforma base y tienen la extensión sobresale. Después de muchas versiones de montaje de servo, encontré que sólo poner tornillos por los agujeros de 4 servo y conectarlos a una pieza de contrachapado en la parte de atrás era la manera más fácil y efectiva para montar el servo! Así que después de pegar en un bloque de madera para elevar el punto de giro un poco así que podía mover el brazo, os adjunto el servo con como pequeño trozo de madera. Sólo planeaba sobre el uso de un servo para este conjunto pero para conectar dos partes del brazo, el eje tendría que sobresalen desde el otro lado. Decidí que sería montar un tornillo en el otro lado. Esto me permite estabilizar las dos piezas de la extensión sin usar dos servos. Ahora es el momento para conectar la extensión del brazo. Sabía que el brazo del robot iba a tener algunos pesos muy pesados en el frente, porque el peso está muy lejos del fulcro que el servo tendría que levantar más peso entonces si el peso era justo cerca del fulcro. Mis servos aunque tienen alto esfuerzo de torsión no pueden levantar mi brazo sin ayuda. Por esta razón he añadido un contrapeso en la parte posterior de este primer largo. Amplió la extensión un poco hacia atrás para que mi contrapesos tenían espacio para montarse en. Para contrapesos, usé un montón de arandelas y cojinetes del patín que tenía puesta alrededor, luego ponerlas a través de un tornillo de repuesto y había montado en la parte posterior. Me gusta llamarlo el "disipador de calor cilíndrico" debido a la impresionante mirada que le da al robot, pero realmente es sólo exceso de peso. Otra parte de la que hice para quitar peso para mis motores podían levantar el brazo fue perforar madera en la extensión. Los agujeros de la extensión no fue hecho para miradas pero era quitar parte del peso del brazo. Cabría preguntarse si realmente pesa mucho, es realmente sólo unos pocos gramos pero debido a la distancia de las cuentas de onzas siempre poco de fulcrum!













