Paso 1: Montaje de la placa de robótica - parte 1: mecánica




Lista de piezas mecánicas
Nota: Números de parte de Digikey se pueden entrar en su página de inicio. Pulse continuar y llegarás justo a la descripción de la pieza.
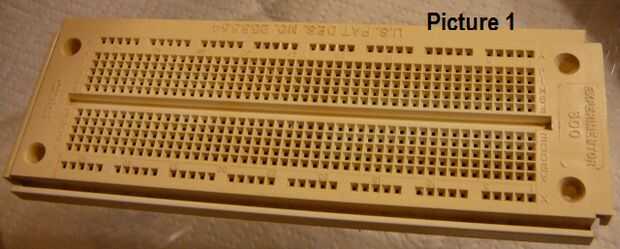
1 protoboard solderless (disponible desde PJRC, Radio Shack o Digikey 438-1045-ND)
2 motores Pololu
1 chip Roller Ball (vienen en un pack de 3. Compartir con un amigo o mantener para los repuestos).
1 caja de pilas para 4 pilas AA (Digikey BC4AAW-ND; también intento Frys, RadioShack, etc..)
1 caja de pilas para 2 pilas AA (Digikey BC22AAW-ND
Cinta de espuma
2 enchufes de la pipa (éstos se convierten en ruedas) usted puede encontrar estos en el Departamento de fontanería en Home Depot o una buena ferretería. Elegir un diámetro que te gusta. Ver las siguientes imágenes.
2 grandes gomas (como paquetes de espárragos). Puede usar múltiples más pequeños también.
Vamos a comenzar poniendo las piezas juntas. Cuadro 1 muestra la parte frontal de una placa sin soldadura. Se trata del chasis para la placa de la robótica. Te damos nuestros motores, el portapilas y la bola de rodillo para esto. Si no tienes ya uno adecuado, son algunas alternativas en la lista de piezas.
El componente clave de la mecánico de un robot es el motor. Hablemos de motores durante un minuto antes de entrar con el edificio. El Babuino está diseñado para controlar motores de corriente continua. El problema con motores de corriente continua es que de la vuelta muy rápido. Si su tensión se reduce lo suficiente para ellos, entonces el poder que tienen es reducido. Para reducir la velocidad de salida sin la reducción de energía, se utilizan engranajes. Un servo motor contiene un motor y un tren de engranajes en un paquete bonito, pero se debe modificar para proveer rotación continua. Este sitio proporciona instrucciones claras y detalladas para convertir un servo en un motor de corriente continua que se puede utilizar para este proyecto. (Pueden adquirirse estos servos muy razonable aquí.) Sin embargo, mientras que las instrucciones son muy claras, esta modificación es aún un gran trabajo. Una solución más simple es comprar las unidades que se muestra en la foto 2 de chip; son menos de $6 cada uno. El link está en la lista de piezas.
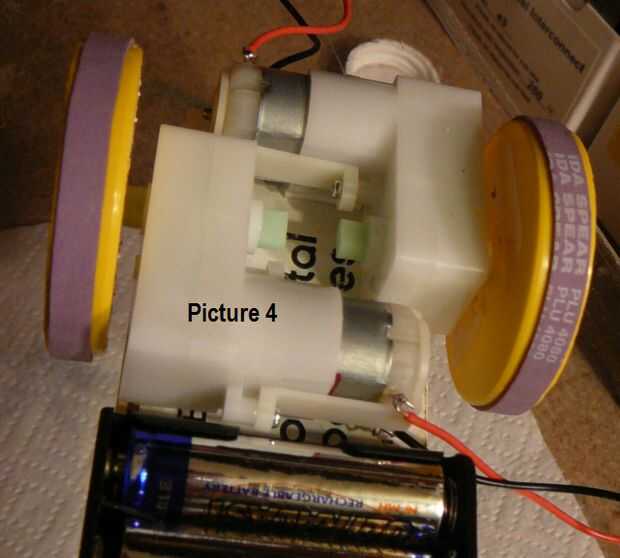
Para los listo para usar en nuestra protoboard, simplemente soldar un cable a cada terminal del motor (22 calibre sólido cobre funciona muy bien). Cortar trozos de cinta de espuma Scotch (Foto 3), aplica a los motores y sujete a la protoboard. Alinee los ejes de la caja de cambios motor y haz como perpendicular a la placa como sea posible. Colocar los motores hasta la parte posterior de la placa como sea posible para dejar espacio para las otras partes. Luego pégalos en la parte posterior de la placa como se muestra en el cuadro 4. Usé cinta de espuma para hacer esto, pero podrias utilizar Velcro o caliente derretimiento pegamento para realizar el trabajo.
Una vez que los motores estén en su lugar, es hora de agregar los titulares de la batería. Necesitamos dos portapilas: uno para cuatro pilas AA y uno para dos baterías de AA. Te montamos una de la cuatro pilas primera a la derecha frente a los motores. Fije con cinta de la espuma del Velcro y pegamento caliente. Tu placa debe ahora parecen mucho foto 4 (excepto aún no tiene ruedas). Lo dos portapilas puede fijarse a la parte superior de la placa donde es conveniente – habrá fotos más adelante. Velcro funciona muy bien aquí porque puede mover las baterías cuando está construyendo circuitos.
En la parte delantera del robot (o la parte posterior, usted puede hacer que ir de cualquier manera) a montar una bola de rodillo. Se muestra con los motores en el cuadro 2. Cuadro 5 muestra una forma de hacer que la bola de rodillo montaje de una manija de la jarra de leche. Después de retirar la manija, cortar a la longitud con el hack vio y perfore un agujero de 5/16 Avos de pulgada en él. La bola de rodillo será una fuerza que entra en el agujero. El montaje final se muestra en el cuadro 2 también. El cuadro 6 demuestra la fijación a la placa. Puede utilizar un bloque de madera o de otros desechos para montar la bola de rodillo.












 (impresión 3D)")
