Paso 4: Puente H para Control del Motor
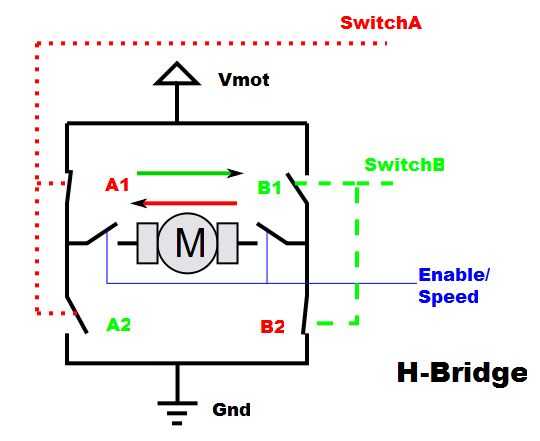
El microcontrolador suministra las señales de control SwitchA (que puede ser alto o bajo), SwitchB (HI o LO) y habilitar (HI o LO). Controles SwitchA A1 y A2 en el diagrama. Cuando SwitchA es HI, se cierra el A1 y A2 está abierto. Cuando SwitchA es LO, A1 está abierto y se cierra el A2. Controles SwitchB B1 y B2 de la misma manera. Activar funciona de manera diferente. Cuando Enable está HI, cierran de ambos interruptores conectados a la misma; que abierta cuando así se LO, apagar el motor. Consideremos lo que sucede cuando hacemos SwitchA HI, SwitchB LO y HI permiten. Cierran de los dos interruptores controlados por habilitar, y A1 y B2 también cierran. A2 y B1 permanecen abiertas. Así que es un circuito completo de Vmot (la tensión en los motores) a la tierra a través del motor. Corriente fluye tal como se muestra por la flecha roja. Si ahora apague SwitchA y encender SwitchB, A1 y B2 abren mientras cerca de A2 y B2. Otra vez tenemos un circuito completo de Vmot a tierra, pero esta vez que la dirección del flujo de la corriente se invierte a través del motor (como se muestra por la flecha verde), así que invierte su sentido de rotación.
Si nosotros activar o desactivar SwitchA y SwitchB al mismo tiempo habilitar es HI, el motor ve la misma tensión en ambos lados. Ninguna corriente fluye, pero dinámico de frenado del motor se produce y viene a una parada más rápidamente de lo que sería si sólo se enciende al activar LO (apagado). A veces esto es importante si usted quiere parar el robot rápidamente.
¡ Excelente! Podemos controlar la dirección, pero ¿qué pasa con la velocidad? Es donde entra la señal de Enable. Obviamente, si apagamos la permiten, nuestro camino actual se interrumpe y el motor se detendrá. Pero ¿qué pasa si nos la permiten encender y apagar muy rápidamente? Resulta que, si lo hacemos lo suficientemente rápido, el motor nunca llega a una parada completa pero sólo retrasa. Por ejemplo, si el interruptor está apagado la mitad del tiempo el motor ve la mitad de potencia. Esta técnica se conoce como modulación de anchura de pulso (PWM por sus siglas). Una discusión completa está fuera del alcance de este Instructable (Google puede ayudar a los interesados) pero los microcontroladores se utilizan circuitos especiales para esto. Babuino proporciona tres señales para el control de cada motor. Para Motor A, estos se denominan izquierda A Motor, Motor A derecha y PWM de un Motor. B el motor tiene las señales de control similares. Izquierdo y derecho son las señales que llamamos SwitchA y SwitchB arriba y así controlan la dirección del motor. PWM es la señal de Enable.
El puente de H hace la conmutación durante la manipulación de corriente suficiente para funcionar los motores. El puente H particular que vamos a utilizar es el L293D. El L293D es un IC de puente H dual que tiene antirretroceso diodos construidos. Antirretroceso diodos protegen el puente H de picos de corriente. El L293D es todo lo que necesitamos para proporcionar control de marcha para dos pequeños motores de DC. Dos de ellos pueden controlar cuatro motores. Los diagramas que siguen muestran cómo gancho para nuestra protoboard de robótica.












 (impresión 3D)")
