Paso 9: Con lo que has aprendido (continuación)
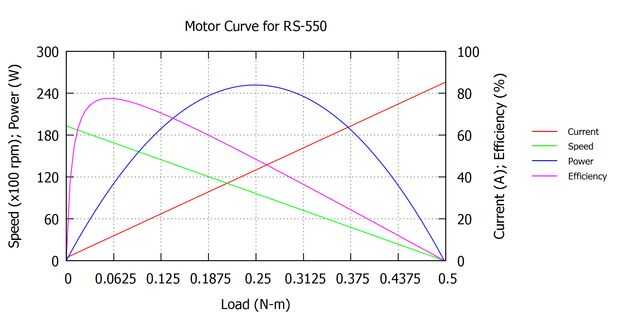
En primer lugar, queremos que el motor no dibujar más de 40 A y soplar un interruptor de circuito. Mirando el gráfico, podemos visualmente vemos que lleva una carga de.23 Nm para la RS-550 a 40 A. Para asegurar que el motor no puede llegar, incluso bajo carga pesada, vamos a tratar de diseñar para una corriente de 20 A. Mirar otra vez el gráfico, vemos que esto corresponde a un par de.115 Nm. Ahora, podemos calcular la reducción sería necesario para lograr el torque necesario de 3.05 Nm.
Reducción del engranaje:
Ahora hemos elegido una reducción del engranaje de 26: 1, que deberían encontrar medios podemos calcular que exactamente nuestro motor de elevador de carga.
De la carga en el Motor:
Ahora, podemos usar la ecuación (1) de "Características del Motor" para calcular la corriente que esperaríamos que el RS-550 para dibujar en esta carga:
Consumo de corriente:

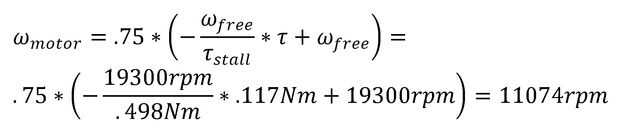
Nuestro estimado corriente, 21.0 A, dentro de los aceptable límite de 40 A. A continuación, determinaremos la velocidad rotacional del eje de salida caja de cambios usando la ecuación (2). Serán responsables de la eficacia de la caja de engranajes de 75% en esta etapa de los cálculos.
Velocidad del motor:
Ahora podemos comprobar para ver si nuestra relación de transmisión solicitada nos permitirá alcanzar la velocidad de salida deseada, 357 rpm.
Velocidad de la caja de cambios:

Por último, ahora que nosotros hemos verificado que nuestra relación de transmisión cumple con nuestro requisito, podemos calcular cuánto tiempo debe tomar para que el motor levantar el elevador.
Tiempo de elevación:

Hemos ahora completamente comprobamos que nuestra caja de engranajes RS-550 motor y 26: 1 será alcanzar o exceder nuestros objetivos originales. Debido funcionamiento del mundo real es a menudo peor que el rendimiento teórico, es conveniente "overdesign" estos sistemas. Esto también asegura que nuestras simplificaciones hacen que nuestro sistema para llevar a cabo mucho peor de lo esperado.
Cuando vayas primero a través de este proceso, que tenga que pasar por los cálculos varias veces al tratar de diversos motores y velocidades. Como ganan experiencia, ganarás una intuición de que motores y relaciones funciona bien para un trabajo.
El paso final en este proceso es elegir una caja de cambios. En este ejemplo, eligiendo la versión RS-550 de la caja de engranajes de P60 de Banebot con una reducción de 26: 1 hace mucho sentido. No sólo es compatible con nuestro motor, pero tiene también la reducción del engranaje de la derecha y un eje de salida común de.5 pulgada afinado.
Esperemos que este problema de ejemplo ha ayudado a entender el proceso de elección de un motor y caja de cambios. Además, espero que se ha demostrado cómo aplicar correctamente la teoría aprendida anteriormente en este tutorial.


 en sketchup")






")



")