Paso 8: Cableado y código
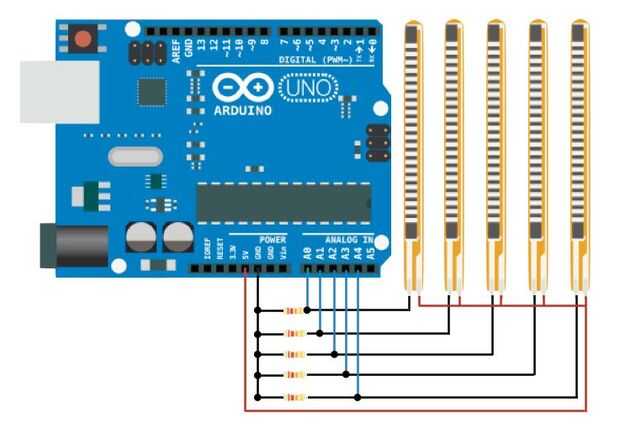
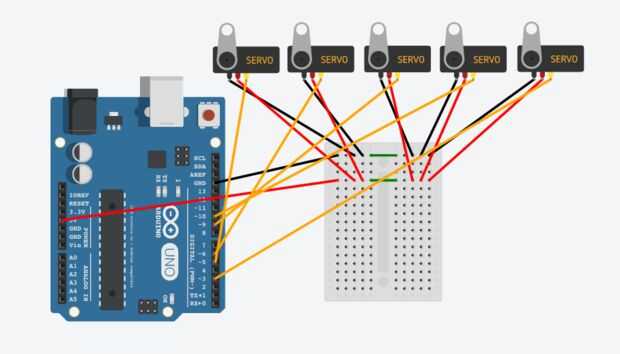
- Usando el protoboard y cables comenzamos a conectar los servos a la Arduino y los sensores de flexión.
- Nota: Al usar el cautín tenga cuidado ya que es muy caliente y puede causar quemaduras graves.
- Servos tienen 3 cables: naranja, marrón y rojo que indican la señal, tierra
- y Vcc respectivamente. Usted puede soldar entre sí todos marrones y rojos juntos entonces les conectan a GND y Vcc respectivamente en el tablero Ardiuno. O un segundo enfoque sería conectar marrones a la Junta de pan en una línea y luego a partir de la señal GND el Arudino. Lo mismo podría decirse de los rojos.
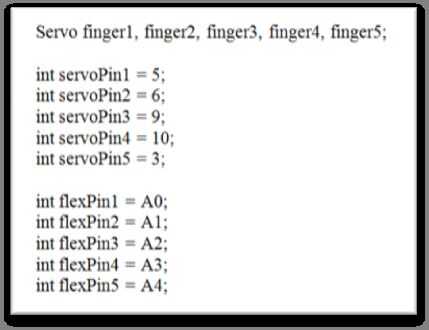
- Conexión de señal se muestra en el código
- Servos conectados a los pines 5, 6, 9, 10 y 3
- Después de asegurarse de que todos los cables estén correctamente conectados cargamos el código mano a Arduino.
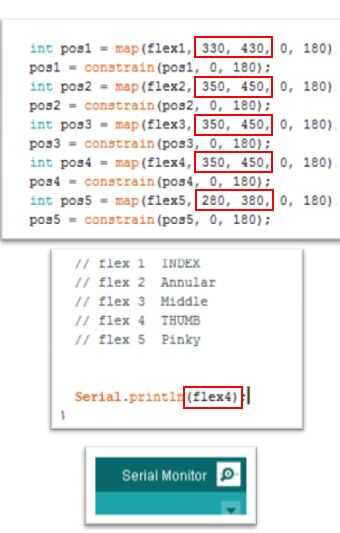
- La única parte donde se deben hacer cambios es asignación de valores (ej. 330 y 430). 0 y 180 no debe modificarse ya que son los límites de movimiento del servo. 0 ser el mínimo y 180 máximo.
- Para obtener las lecturas del sensor flex y determinar los valores min y max. Ir a la parte inferior de la página de código y tipo de sensor que desea obtener las lecturas de (flex 2, flex 3... etc.). Luego cargar el código y abrir la ventana de Monitor serie. Ahora empezar a mover el dedo y escribe los valores máximo y mínimo que se puede ver.
- Ahora que usted está satisfecho con los nuevos valores, guardar el código actualizado y carga a tu Arduino.
- ¡ Felicidades! Usted ha hecho su propia mano robot controlable!
• يتم تلحيم الحساست مع الأسلاك باستخدام قلم اللحام O ARQUITECTÓNICA اللحام. NOTA: قلم اللحام ÁRABE حرارة عالية و يجب الحذر حين استخدامه.
• محركات السرفو يوجد بهم ثلاث ألوان للأسلاك: برتقالي وبني وأحمر الذين يرمزون الى الإشارة القطب السالب و القطب الموجب بالترتيب. يمكنك تلحيم جميع الأسلاك البنية مع بعضها و الحمراء ايضا مع بعضها و تقوم بتوصيلهم الى مدخليGND و Vcc بالترتيب على لوح الأردوينو. O بإمكانك ايصال اللون البني الى لوح التوصيل افضل مسار واحد o من ثم ايصال سلك من الأردوينو من مدخل ال TIERRA. نفس الكلام يمكن تطبيقه على القطب الموجب.• المحركات يتم تثبيتها افضل مداخل الأردوينو 5, 6, 9, 10 O 13
• بعد التأكد من طريقة ايصال الأسلاك الى الأردوينو قم بتحميل البرنامج VISITA.• الجزئية التي تتطلب التغيير موضحة بالمربعات الحمراء. افضل الصورة الأولى ترمز المربعات الى القيم العظمى o الصغرى للحساسات و التي يمكننا عرضها من خلال تغيير الرقم الموجود افضل المربع الأحمر افضل الصورة الثانية و التحميل البرنامج ثم الضغط على "Serial Monitor"
• قم بتحريك الأصابع o اختبار القيم العظمى o الصغرى الى أن تناسبك.
• الآن o بعد التحقق من سلامة القيم قم بتخزين الملف المعدل و تحميله على لوح الأردوينو.• مبروك! لقد قمت بتصميم ذراعك الآلية الخاصة!




")








 - neurálgico Fablab")