Paso 2: Ensamblajes de los Dedos














RECOMENDACIONES:
- Antes de armar los dedos, retirae cualquier soporte o residuo de la impresión, verifique el acabado de las piezas móviles sea óptimo, de lo contrario podría requerir limar o lijar la pieza para suavizar las imperfecciones o ensanchar conexiones.
- Si es necesario lijar una pieza y se opaca, al frotarla con un paño humedecido con solvente recupera su brillo
(A) Ejes de Rotación
La GalileoHand funciona por medio de dos ejes de rotación. El primero se encuentra entre la falange distal y la falange proximal y el segundo; entre la falange proximal y la palma.
-Existen dos posibles opciones para formar estos ejes/articulaciones:
-Tornillos Charlotte un diámetro de 3 mm máximo, de manera pueda sujetar las partes exteriores de la pieza.
Filamento de PLA o ABS para formar el eje de rotación. Se recomienda utilizar este material y el método descrito a continuación.
- Recortar un pedazo de filamento del ancho de la falange distal + 6 mm para cada dedo. Montaje el filamento en los agujeros de ambas falanges para unir las dos piezas Imagen 1.
- Calentar una superficie plana de metal hasta alcanzar la temperatura suficiente para derretir el filamento. Imagen 2.
- Mientras el filamento está insertado entre la falange proximal y distal, aproximar un extremo del mismo a la superficie de metal caliente para derretirlo (Imagen 3) hasta lograr un diámetro mayor el orificio externo de la falange distal.
- Respuesta los pasos anteriores en el otro extremo hasta los extremos derretidos del filamento queden en contacto con la superficie externa del dedo y mantengan el eje de rotación en su posición. Imagen 4
- Realizar los pasos anteriores para los cinco dedos.
(B) Elásticos en los Dedos
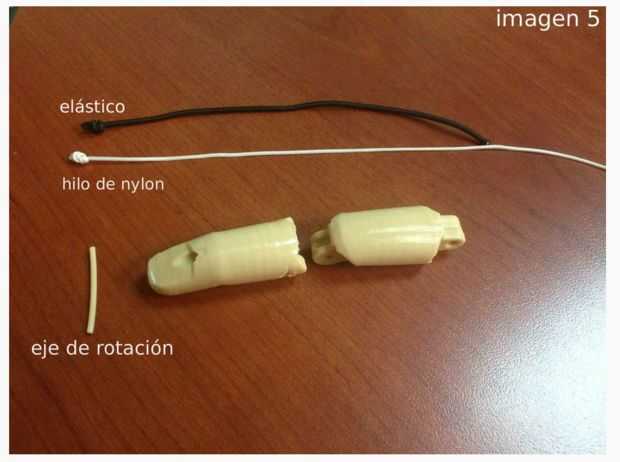
El propósito de los elásticos es ejercer una fuerza para mantener los dedos en una posición natural de apertura. Medida de los Elásticos: Para cada dedo, recortar un trozo de elástico cuya longitud sea igual a la longitud del respectivo dedo + 3 centímetros. Imagen 5 Pasos para Insertar los Elásticos:
- Realizar un nudo en el extremo superior del elástico.
- Verificar que no haya ningún residuo impida el paso del elástico en los conexiones de ambas falanges.
- Montaje elástico en orificio próximo a la uña en la falange distal. Imagen 6
- Empujar el elástico a través del conducto formado entre las falanges del dos, hasta asome por la base de la falange proximal. Imagen 7 Antes de unir los dedos a la palma, se debe insertar los elásticos dentro de los dedos.
(C) el Pasos de Insertar de para Hilo de Nylon:
1. Realizar un nudo en el extremo superior del hilo de Nylon
2. montaje el hilo de Nylon en lengüeta de la falange distal que permite la flexión. Imagen 8
3 Empujar el hilo de Nylon a través del conducto formado entre las falanges del dos, hasta asome por la base de la falange proximal. Imagen 9 Antes de unir los dedos a la palma, se debe insertar los hilos de Nylon dentro de los mismos. Los hilos permiten realizar el movimiento de flexión de la mano.
(D) Unión de los dedos con la palma
Para esto hay formar el eje de rotación entre la falange proximal de los dedos y la palma.
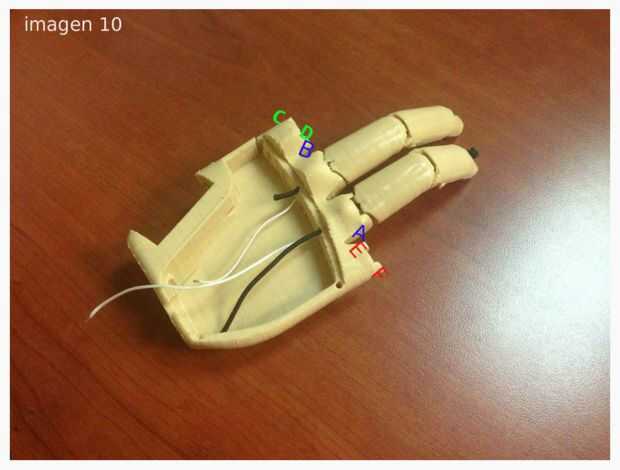
- Cortar un segmento de filamento PLA medido desde el punto al punto B. Cortar un segundo segmento medido desde el punto C al punto D y finalmente un tercero desde el punto E al punto F. Imagen 10
- Montaje el extremo del elástico del dedo anular y medio en el agujero G del respectivo ¡ receso de la palma. Imagen 11
- Montaje el filamento de A B para formar el eje de rotación/articulación entre la falange proximal y la palma del dedo medio y anular. Imagen 12
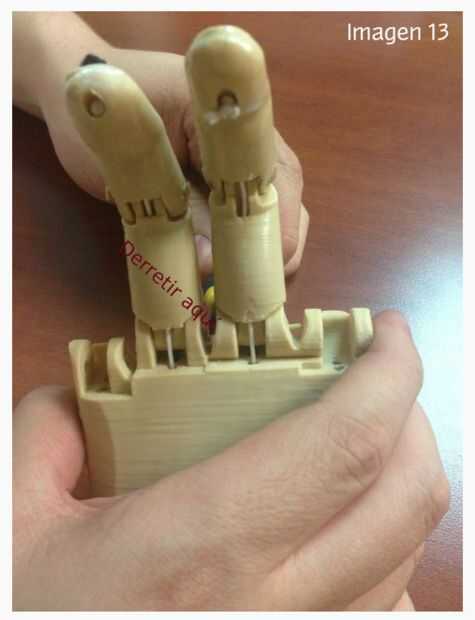
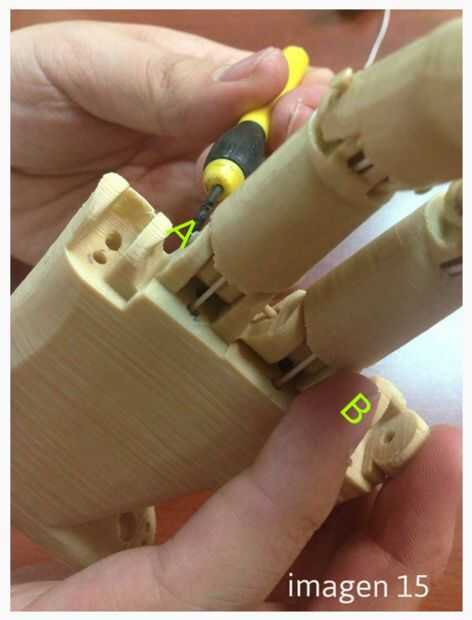
- Derretir los extremos del filamento AB Imagen 14 y Imagen 15 siguiendo la misma técnica del primer eje de rotación. Es necesario derretirlo en Advertisement espacio entre el el dedo medio e indice Imagen 13, dos de para formar ejes individuales.
- Montaje el extremo del elástico del dedo índice en el agujero G del respectivo ¡ receso de la palma. Montaje el filamento CD para formar eje de rotación del respectivo dedo. Derretir los extremos del filamento CD siguiendo la misma técnica del primer eje de rotación.
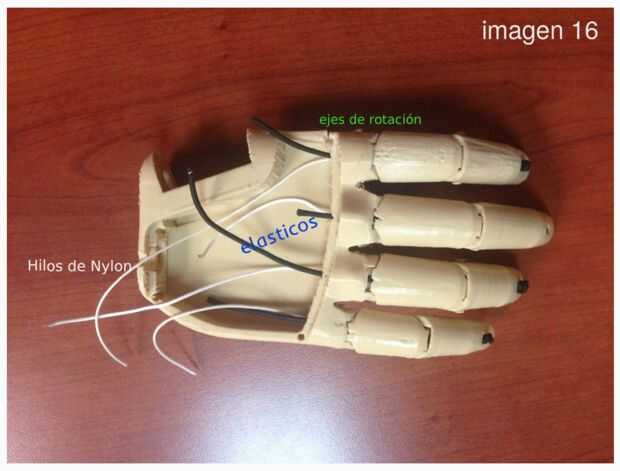
- Montaje el extremo del elástico del dedo meñique en el agujero G del respectivo ¡ receso de la palma. Montaje el filamento EF para formar eje de rotación del respectivo dedo. Derretir los extremos del filamento EF siguiendo la misma técnica del primer eje de rotación. Los dedos deben de quedar de la siguiente manera Imagen 16
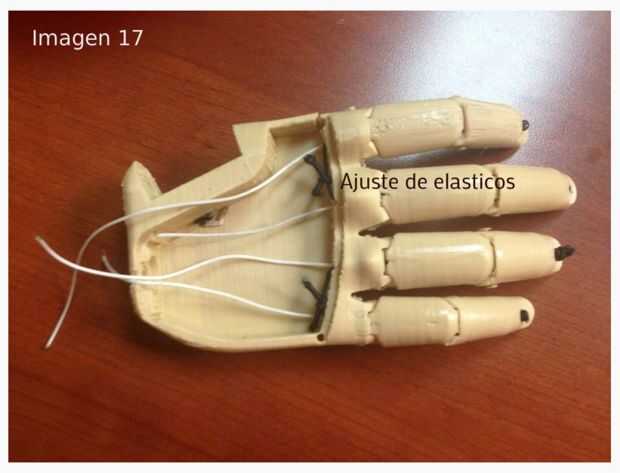
(E) Ajuste de los Elásticos
Estirar simultáneamente los elásticos del dedo indice y medio hasta tensar los elásticos. Realizar un nudo para mantener los elásticos tensos. Respuesta el proceso uniendo el dedo anular y meñique. Imagen 17
Todos los pasos anteriormente descritos están ilustrados el de en video GalileoHand - Asamblea de dedos













