Paso 2: Método de Control: Control Integral proporcional de hayan
La solución: un controlador PID.
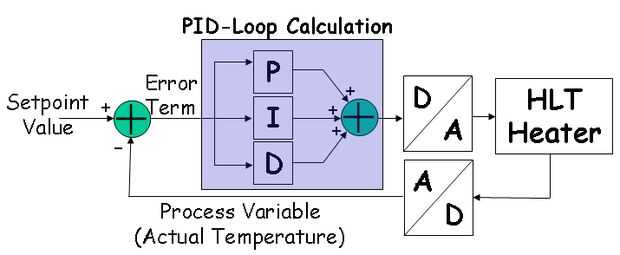
Un controlador PID utiliza tres términos para calcular una salida que debe corregir el error.
salida = (kp*error)+(ki*errorSum)+(kd*dError);
El primer término (el término proporcional) mira nuestro actual entradas (pitch y roll en nuestro caso) y lo compara con la posición deseada también conocido como punto de referencia (0 grados para vuelo nivelado). El error calculado (diferencia) se multiplica por una constante (KP) para contener el valor dentro de nuestra gama de salida (0 a 180 grados es gama de servo, pero más pequeño una vez se instala en un avión de RC). Básicamente, cuanto mayor sea el error, mayor será el necesario cambio.
El segundo término es el término integral. Sumas todos los errores anteriores (como el término proporcional) con el tiempo. Si el error persiste sin corregir durante demasiado tiempo, el término integral crece más grande de aumentando la magnitud de nuestra salida hasta que se haga la corrección. Una vez más, se multiplican por usted constante (KI) para contener el término dentro de la gama de salida * advertencia * es posible que si recoges errores por mucho tiempo el término integral superará su capacidad de salida. Esto se denomina conclusión INTEGRAL. Esto me tomó mucho tiempo para corregir. Pude minimizar el término limitando el alcance de tiempo que han consultado mi error. Para evitar que los dos primeros términos overcorrecting nuestro error debemos mirar el tercer término.
El término derivado (dError) mira la velocidad que sus entradas del sensor se aproximan a su punto de referencia para cuando el error se corregirá. El término derivado se puede utilizar para retrasar la salida si está corrigiendo demasiado rápido y es probable que a adelantar el punto de referencia. Multiplica por el constante KD para mantener la salida dentro de la gama posible.
El PID es un controlador de realimentación muy potente (es decir, utiliza entradas y salidas anteriores para calcular la salida de nuevo). Será de gran beneficio para hacer alguna lectura exterior si no han utilizado antes. Realmente, la página de la wikipedia hace un muy buen trabajo de explicar los conceptos involucrados. Si sabes cálculo, el PID puede convertirse en herramienta muy intuitiva. http://en.wikipedia.org/wiki/PID_controller#Control_loop_basics
Una vez usted entienda Cómo funciona, por favor mira la sección de estructura en el lazo de control feedforward.






")






