Paso 4: Los vínculos de motor de la máquina
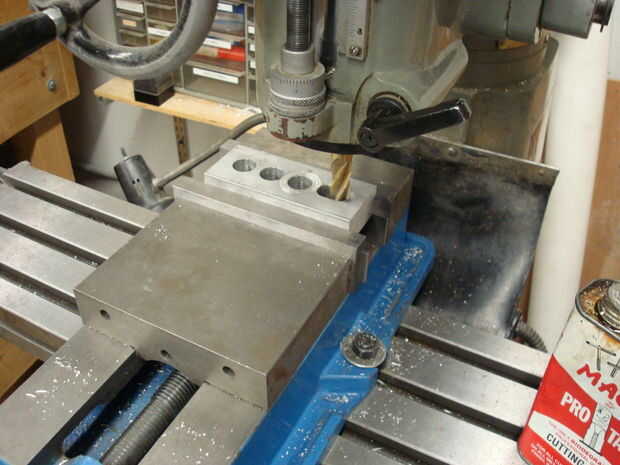

Comienza por cortar el bloque de aluminio de 12" en dos ~ 5", luego taladro y molino de los agujeros y ranuras. La ranura es donde el motor se une al acoplamiento, y el tamaño de la misma es dependiente sobre el eje de los motores que tienes.
Después del mecanizado del bloque, realizar dos agujeros perpendiculares a la ranura y tap para tornillos de fijación (ver segunda imagen). Mis motores tienen dos pisos en el eje, por lo que agregar tornillos de ajuste permite una fijación extremadamente rígida de los vínculos.
Si no tienes las habilidades o el equipo para que estos vínculos, usted podría participar su dibujo a una tienda de máquina de fabricación. Esta es una parte muy simple a la máquina, por lo que no cuesta mucho. Diseñé mi vínculo con un ranura con fondo plano (de modo que podía sujetarla con un tornillo preexistente en el eje del motor, así como tomar ventaja de los pisos en el eje), para que de por qué es necesario mecanizado en primer lugar. Sin embargo, este vínculo podría ser diseñado sin una ranura sino más bien un gran orificio, por lo que todo el trabajo podría hacerse en teoría en una prensa del taladro.
El dibujo que utilizan para el mecanizado puede descargarse a continuación. Este dibujo le falta la dimensión de la profundidad de la ranura, que debe ser marcada como 3/4".


")










