Paso 3: Conecte el tablero de Control para analizador lógico
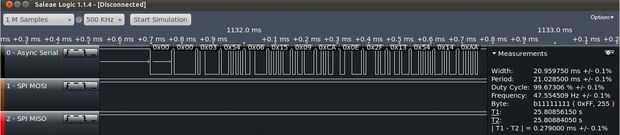
Para este Instructable primero un Tektronix 1241 Analizador lógico se utilizó entonces una Saleae Logic que permitió medir con precisión la frecuencia con la que los marcos de los datos fueron enviados (22ms) incluyendo el formato, cantidad y contenido de caracteres en cada byte de su serial protocolo (8 bits de datos, sin paridad, 1 bit de parada), así como de su tasa (133000 baudios). Cada marco contiene 14 bytes que pueden ser convenientemente representados en notación hexadecimal.
Nota: la velocidad de transmisión bastante crítica. El estándar más cercano baudios a nuestro objetivo apoyado por dispositivos de serie la mayoría si no todos (incluyendo el dispositivo de USB a Serial que requerimos) es 115200. Esto fue demasiado lejos hacia fuera de nuestro transmisor y durante los intentos de experimentación inicial falladas la comunicación. Se hizo necesario seleccionar el dispositivo de USB a Serial cuyo chipset permite el ajuste de una velocidad arbitraria. Para la versión final nos decidimos por un modelo que incluyó un conjunto de chips FTDI (específicamente el FT232 USB-Serial (UART) IC, véase el glosario para más detalles).
A este paso son archivos de registro de ejemplo capturados con la aplicación del programa de «Lógica» libremente disponible de Saleae. En el primer archivo que el acelerador esté completamente hacia abajo, en el segundo archivo el acelerador esté completamente hacia arriba.
Discusión y las direcciones más específicas considera cómo utilizar un analizador lógico están fuera del alcance de este documento.
Explicación del laico:
(Nota: esta explicación no es fiable al 100% pero puede ser una manera útil de visualizar y a entender lo que está sucediendo)
En nuestra analogía anterior, dijimos que la presión del agua y el nivel como fluyó a través de tuberías era similar a la tensión de la corriente eléctrica que fluye a través de nuestro circuito, siendo alterado por las "puertas" de las palancas de mando ser levantado y bajado. Como aprendimos usando el osciloscopio sin embargo, la señal enviada entre el microcontrolador y el chip del transmisor es digital, no analógica. Esto efectivamente significa que cualquier momento que tomamos una medida de la tubería de agua o estar lleno o vacío en un momento dado, nunca en el medio. Por la alternancia entre estos dos extremos, se están enviando números binarios .
Otra forma de pensar esto es imaginar dos personas en cualquiera de los extremos de la tubería, un remitente y un receptor. En este caso el remitente es el microcontrolador (porque sabe el valor de los números para ser enviado) y el receptor es el chip transmisor. Intentar enviar información por inundación y el drenaje de las tuberías sería muy lento, así que en vez están usando una linterna para comunicarse en una forma de código morse.
Cada cierto tiempo, el receptor se asoman en el tubo y en el mismo momento el remitente será encender la linterna para indicar uno o dejarlo para indicar un cero. Está comunicado cada vez que esto sucede un solo bit . Esto sucederá rápidamente ocho veces en una fila, formando un byte. Si cada bit fue una letra en una palabra, el trabajo es el byte. El analizador lógico más nos dice que hay catorce bytes o "palabras" en cada frase hablada por el microcontrolador para el chip transmisor y cada frase contiene todas las opciones de joystick para cada dirección de movimiento del mando es capaz de ajuste. La oración completa es repetida constantemente aproximadamente 45 veces por segundo (una vez cada 22ms) como el control remoto está encendido.
La velocidad en baudios mencionados como siendo crítico el tiempo predeterminado el remitente y recibida habría acordado para enviar flashes de luz. En otras palabras si el remitente va a enviar un flash una vez cada cinco segundos pero el receptor sólo buscaba una vez cada diez segundos, el receptor sólo estaría allí ser testigo de la mitad de las señales, y después de la primera vista sería grabar cada uno de los siguientes bits en las mal posiciones dentro de las palabras están grabando. Cuando decimos que la tasa de baudios es 133000 lo que realmente significa es que hay destellos individuales hasta 133.000 pasando cada segundo!

")

")



 helicóptero del vuelo.")





