Paso 4: Andamios, LEDs, sensores de flexión
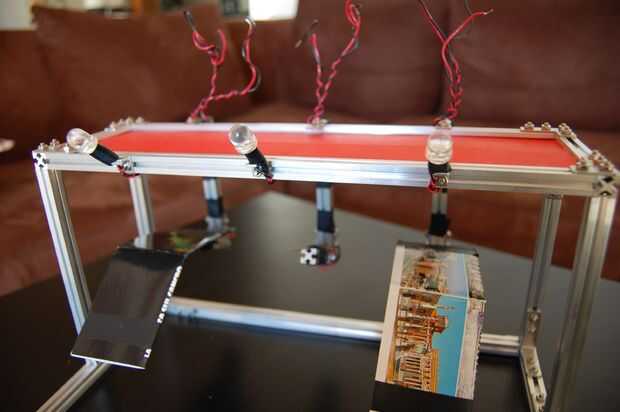


Usé el MakerBeam para construir una pieza rectangular para sujetar los brazos de palanca de tres. Las imágenes de este paso muestran el diseño en general bastante claramente.
La única consideración es la base profunda, para que cuando el perro golpea las palancas, el juguete no caiga. Nota el mini soportes en L en la parte delantera colocado para conectar los LEDs. Aquellos no incluidos en el conjunto de MakerBeam, acaba con ellos alrededor de un motor de servidor.
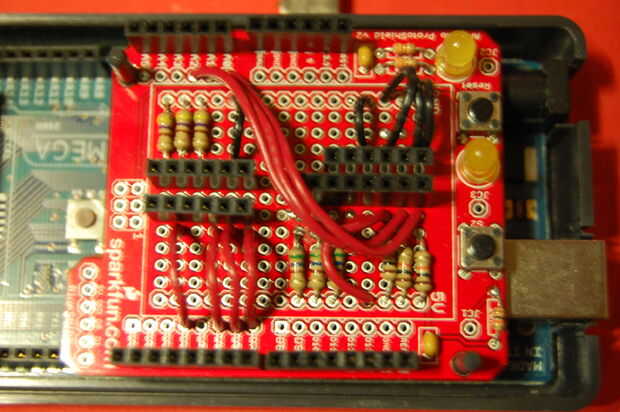
Arduino ProtoShield:
El arduino ProtoShield kit es un paquete bueno para empezar a trabajar en este proyecto. Le da una pequeña área de prototipos para conectar los LEDs y sensores de flexión muy convenientemente. Como el escudo arduMoto, existe una muy buena Guía de inicio rápido para el ProtoShield. Le muestra cómo configurarlo y probarlo cuando usted lo reciba en el correo. Solía el ProtoShield para fácilmente conectar tres LEDs brillantes y tres sensores de flexión, como se describe a continuación.
Flex de sensores:
Usé algunos poco 2.2" flex sensores que compré de Sparkfun. La resistencia de los cambios de sensor de flexión cuando está doblado. Aquí le damos una pequeña explicación excelente de la tecnología con una Guía de inicio rápido para probar sus sensores. Estos sensores son realmente la clave para este proyecto.
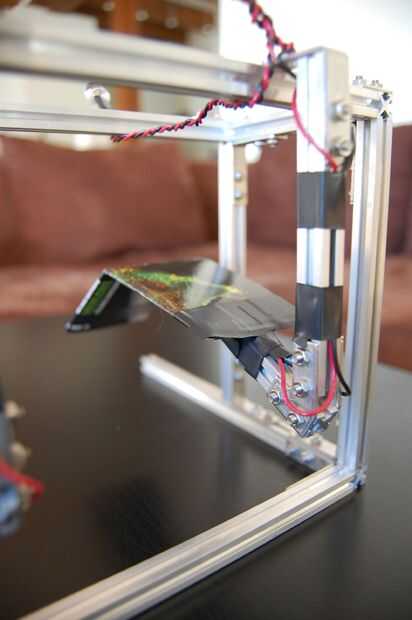
Tres para el andamiaje de tres brazos poco sobresale de la parte superior enganchadas. Básicamente había suelda los extremos a un poco de alambre cubierto con algunos del encogimiento del calor para proteger u ocultar los cables y luego había grabado cada uno de los andamios. Envuelve el exceso de cable hasta la parte superior del módulo para conectar al arduino.
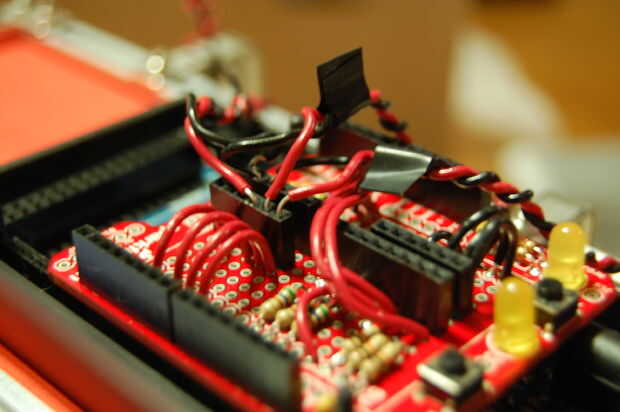
Uno de los sensores va a la tierra y el otro está conectado a un pin analógico en y a través de un resistor de 10K a + 5V. No tienes que hacer un seguimiento de que cable está conectado a los pines en el sensor de flex porque son intercambiables. El programa que escribí es activado por un cambio en el valor de la resistencia, positivo o negativo.
Los sensores de flexión realmente están conectados a las entradas analógicas, así que no tienes que definir el 'pinMode' en el código de Arduino. Usé pernos analógicos 0, 1 y 2 de izquierda a derecha para los sensores de flexión.
En la parte superior del sensor flex sólo plegar algunas postales rígidos y con cinta como locos a los andamios. He doblado la postal sobre y cortar un pequeño agujero para hacer un pequeño bolsillo para el sensor ir en. El sensor se desliza en la parte recta de la postal protegida en el juguete. El perro se les debe enseñar la parte plegada hacia abajo de la postal de la palmada. De esta manera el sensor flex se desencadena sin directamente haber sido abofeteado por el perro, que podría resultar en él partiendo. En realidad la advertencia en la caja para estos sensores de la flexión es que se rompa en el punto donde los pines conectan al sensor. A pesar de que mi perro es un chico pequeño, terminó golpeando estas cosas bastante difíciles en ocasiones o dejando su pata a descansar, mientras que el sensor de flexión. Por eso puse los sensores bastante profundo en el brazo de metal y grabado muy justo por encima del punto de pivote débil en el sensor flex, para darle apoyo. Cada sensor se ha visto afectada aproximadamente 100 veces hasta con mi perro y prototipos, y ninguno de ellos ha roto todavía. Las postales también son agradables porque se puede reemplazar fácilmente cuando dobló para arriba o su perro mastica que hasta, pero sería bueno encontrar algún tipo de material elástico resistente que no necesita ser intercambiados hacia fuera.
Super brillante LED:
Usé tres Super Bright LEDs para este proyecto, rojo, verde y azul. Soldar cables a los terminales (esta vez tienes que hacer un seguimiento de los pasadores). Positivo (perno largo) está conectado a un pin digital en el protoShield, y el terminal negativo está conectado a través de un resistor de 470 Ohm a tierra.
En la parte superior de la frente de los andamios había puesto algunos soportes en L pequeño tenía por ahí un viejo kit de motor servo y montaron a horcajadas las patas de los LEDs a través de ellos, enhebrar el alambre alrededor de nuevo y hasta la parte superior como los sensores de flexión.
Para los LEDS usé pernos digitales de 4, 6 y 8, porque no interfieren con el escudo de arduMoto.
Ahora puede consultar las imágenes de este paso ya debe han todo configuración como en la imagen antes de ir a probar el módulo táctil hasta la fecha.











