Paso 17: Pruebas funcionales mientras que en fase de construcción.

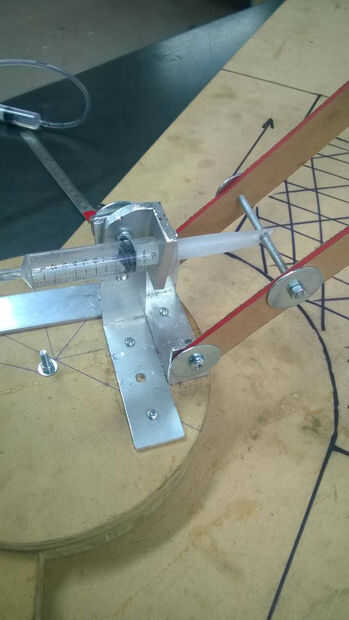
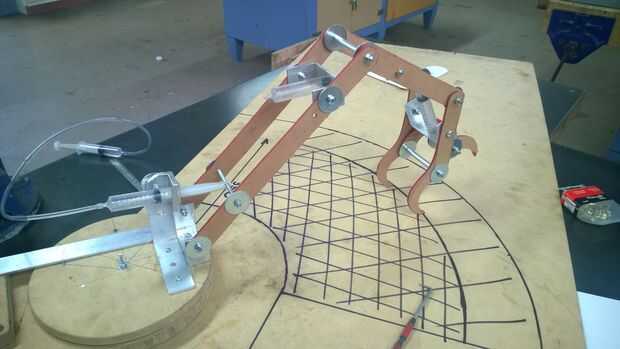
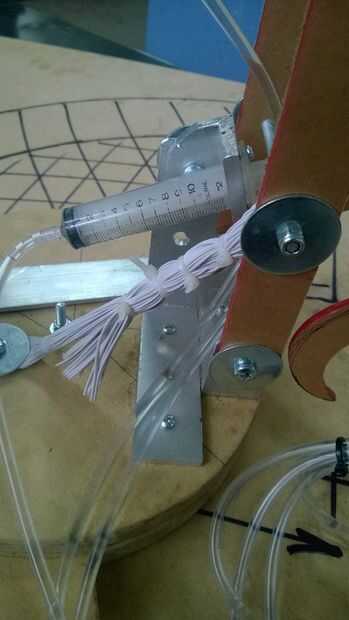

imagen 1
Durante la prueba funcional encontré que mi articulación del codo no se mueve mucho lo suficiente para que tras un debate con el Sr. Richardson y ensayo y error, moviendo el pivote de la jeringa hacia arriba y hacia abajo me mudé el orificio de la jeringa pivote más cerca del punto de pivote para dar más movimiento que ahora se mueve una distancia adecuada, pero aún conserva suficiente palanca para levantar el brazo, pero ahora no podía llevar el brazo atrás lo suficiente porque fue detenido por la jeringa de modo que pregunté Señor Richardson si podía mover todo mi base hacia atrás un poco para que venga detrás lo suficientemente lejos y todavía llegar lo suficientemente lejos y me dijo que sí y se muestra en esta foto todavía alcanza el límite mínimo que tiene que llegar y recoger el contenedor.
Foto 2
Como se ve en esta foto decidí llevar el pivote en la base
justo al borde para dar la distancia de la mayoría para el movimiento de las jeringas y los menos tiene que mover más puedo mover las articulaciones de pivote para dar más influencia para jeringas en los resultados en un suave movimiento más preciso del brazo en total al recoger el objeto.
También encontré a tener que aflojar y apretar las tuercas de bloqueo a menudo es muy lento pero Señor Richardson me dio la idea de utilizar las tuercas normales para la construcción y luego reemplazarlos más adelante.
cuadro 3
Aquí mi brazo es extendido que puede alcanzar el límite máximo para que coincida con las especificaciones establecidas por mi actor Señor Richardson.
cuadro 4
Con mi jeringa principal sobre pruebas se movió lejos suficiente pero
no fue capaz de retraer el brazo como lo fue pesada por lo que discutí la Idea con el Sr. Richardson de usando un resorte para ayudar a la retracción del brazo, pero el único problema era para encontrar un resorte con la tensión correcta sería muy difícil entonces me acordé que tenía algunas cuerda del amortiguador auxiliar de cuando fui puenting que tiene cientos de pequeños filamentos que yo podía seguir añadiendo hebras hasta conseguir la tensión correcta y después de la prueba funciona bien. Y ahora tengo la tensión a un punto donde se automático retraiga completamente extendido y con el envase que ayuda mucho con el control de sus movimientos como no tienes que poner mucho esfuerzo en Contracción la jeringa que en la prueba Señor Richardson encontraron muy útil.
cuadro 5
En algunas pruebas más frecuentes Señor Richardson para colocar el
objeto cualquier desgaste de la Junta y lo que encontré fue que podía convertirlo en una forma pero traerlo detrás el vacío en la jeringa no era lo suficientemente fuerte para traerlo detrás así que hablé con el Sr. Richardson acerca de cómo algo de plomo para balancear hacia fuera pero él me recordó que el plomo es venenoso así que tuve que venir para arriba con otro peso que me dio la idea de usar un trozo de acero y tornillo que la tabla de la vuelta.













