Paso 3: Motores y controlador del Motor microcontrolador

Velocidad
La velocidad de destino del robot sumo era de 1m/s.
Utilizando la ecuación, la velocidad = distancia/tiempo, el robot cubre el diámetro de la arena, menos la longitud del robot, en poco más de un segundo. Esta velocidad es suficiente para el robot detectar a opositores y evadir cuando sea necesario.
Esfuerzo de torsión
Los principales factores con determine recorrido empujando energía es su robots motores y tracción.
Los motores que seleccioné fueron 47:1 motorreductor de Metal 25Dx52L mm HP de Pololu.
Las ruedas estaban personalizadas hecho ruedas super agarre, discutidas más adelante.
Tracción
Para generar la tracción máxima de los motores, se utiliza un sistema de impulsión de correa entre el, centro de ruedas delanteras y traseras. Esta adición triplicó el área de contacto con el suelo de arena, resultando en una mayor potencia de empuje.
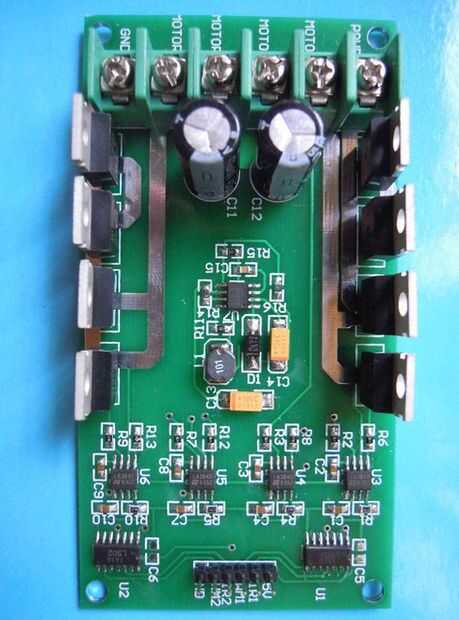
Controlador de motor
Los motores fueron controlados utilizando PWM, lo que permite velocidades variables de motor. El controlador es capaz de soportar tensiones de 6v a 36v y una continua corriente de 10A (máximo 60A). Consta de dos chips de controlador de medio puente y baja resistencia N-channel MOSFET. Los dos chips de controlador de medio puente hacen pérdidas debido a los MOSFET de conmutación mínima.
Los pines de control en el controlador del motor incluyen 2 pernos de dirección, uno para cada motor, cuando el motor gira alto adelante y baja motor gira al revés. También contiene 2 entradas de la PWM, 1 para cada motor, que un 1kHz de frecuencia de pulso de 100kHz para controlar la velocidad del motor. Ajuste el pin PWM baja aplica las roturas del motor para detener.
Para hacer este robot sumo pequeñas el exceso PCB en el extremo del regulador del motor del tuvo que cortar con la Dermel, haciendo su longitud total más corta.
Microcontrolador
El microcontrolador utilizado fue el ATMega128, programado en C con AVR studio 5. Este microcontrolador tiene un procesador de 16Mhz y una gran cantidad de puertos IO que es suficiente para establecer interfaz con y controlar el robot de sumo. Sin embargo un Arduinoo RaspberryPI podría también usarse fácilmente.





")







