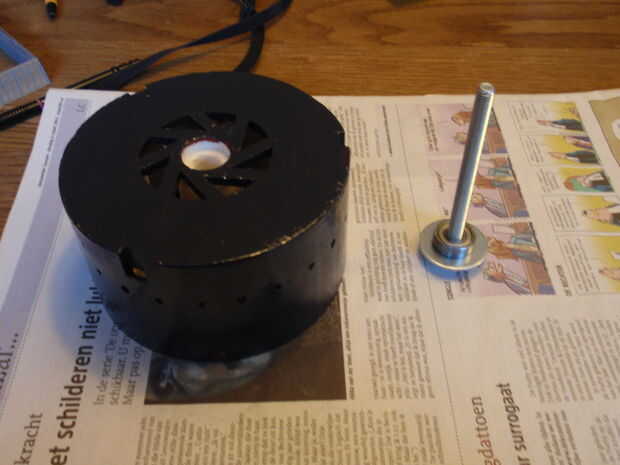
Paso 5: Armar la base















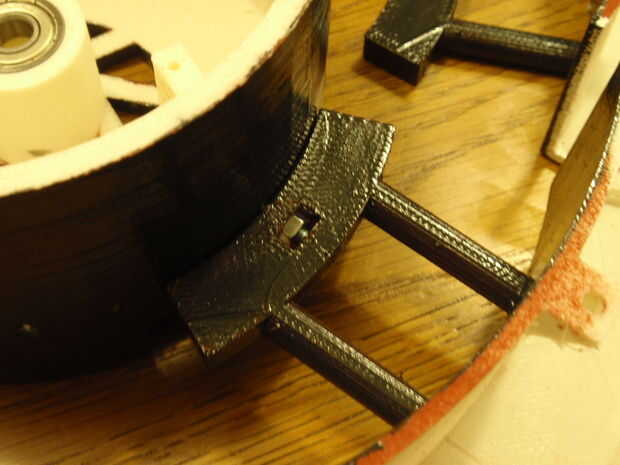










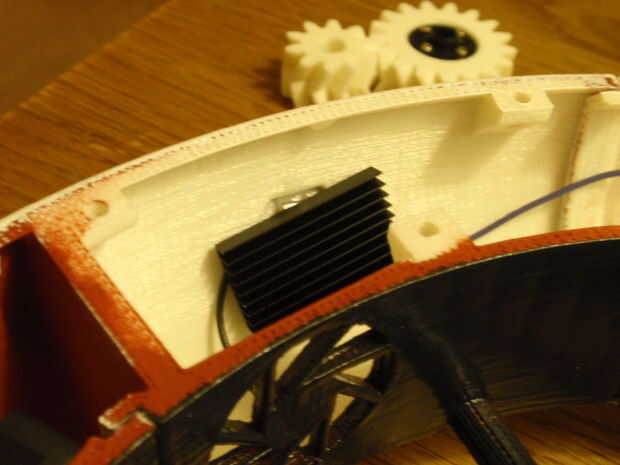



Montar el engranaje conductor, girando en el plato del servo redondo para el engranaje grande con 4 tornillos pequeños.
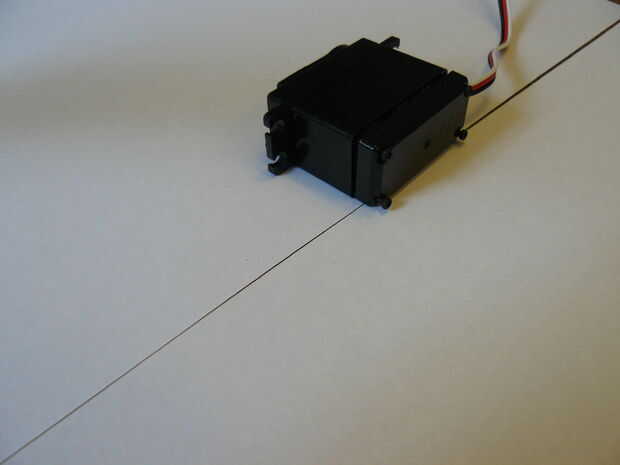
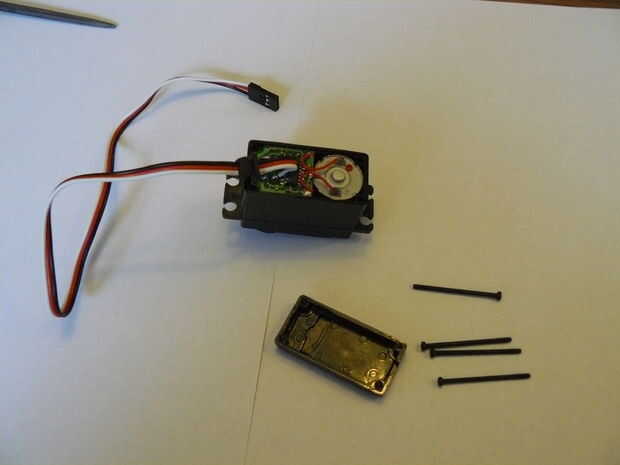
Modificar el servo para que encaje. Debido a algunos errores ingeniería, el servo normal debe tener los cables salen del fondo. Retirar la cubierta posterior y la apertura del archivo por lo que pueden salir de los cables de la parte posterior. El alivio de tensión no es necesario porque el servo es estacionario.
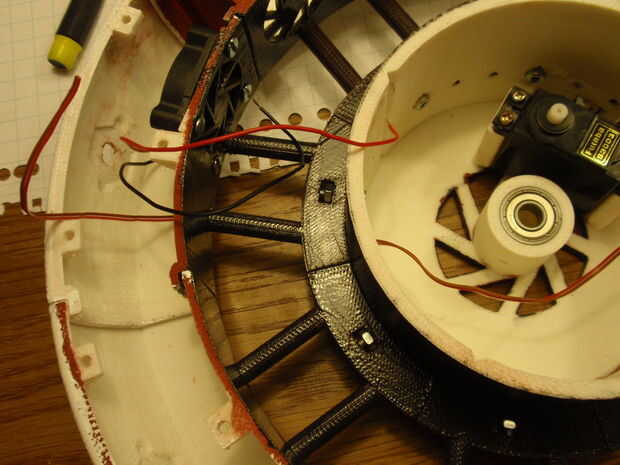
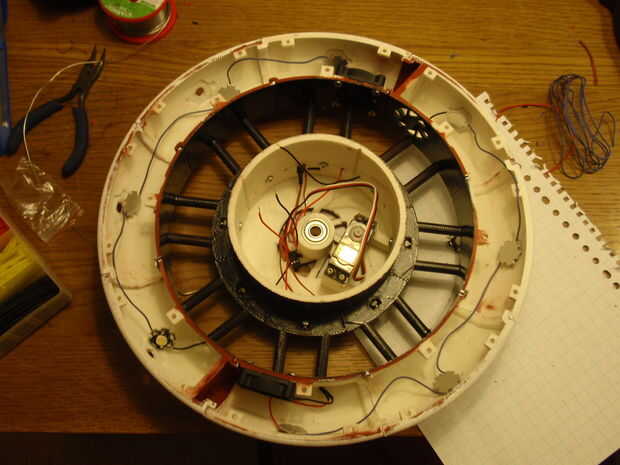
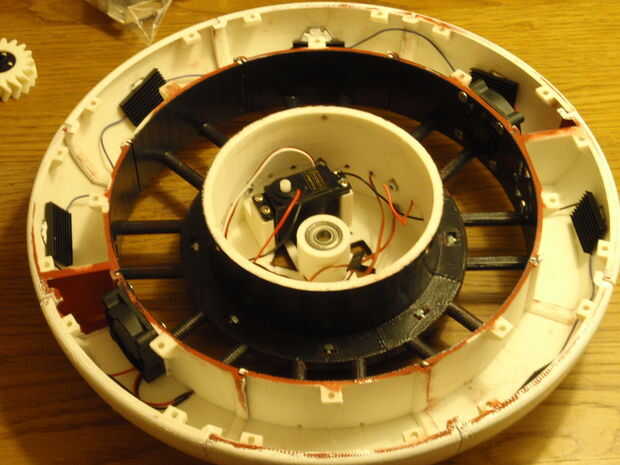
Servo de lugar en la base. Hay agujeros para montar el servo.
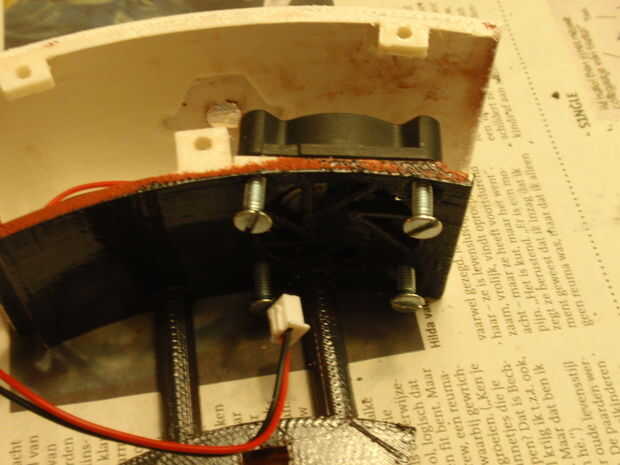
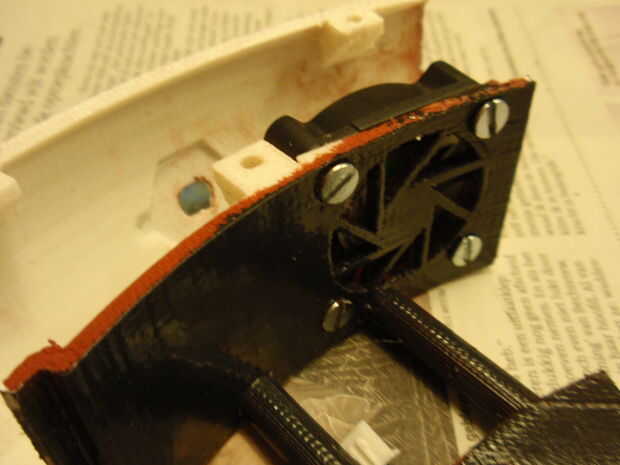
Montaje de los ventiladores de 40mm en las piezas de 2 anillo con 4 tornillos de cabeza avellanada M4. Los ventiladores que utilizan eran penetrantes, tan no las tuercas eran necesarias. Los fans mantendrá el aire que se mueve más allá de los leds.
Añadir piezas de anillo a la base poniendo 8 tuercas en las aberturas de todas las piezas del anillo. 8 tornillos de cabeza cilíndricos M4 mantendrán las piezas anillo Unidas a la base.
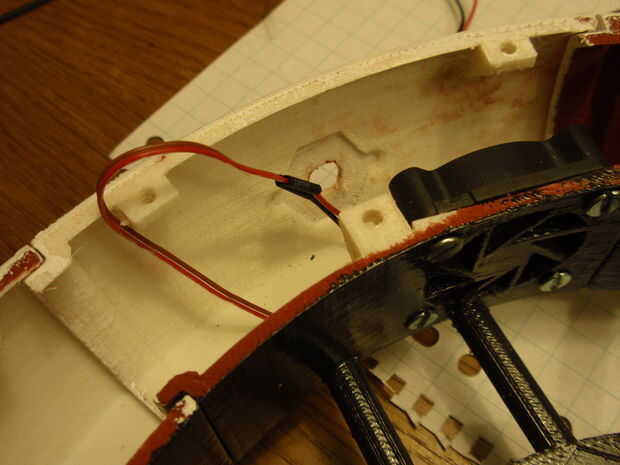
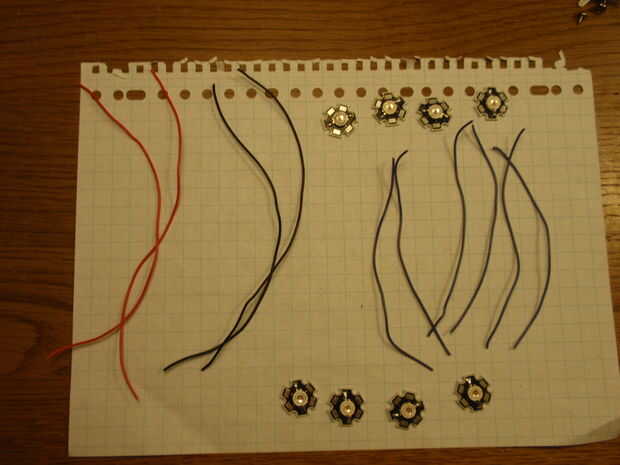
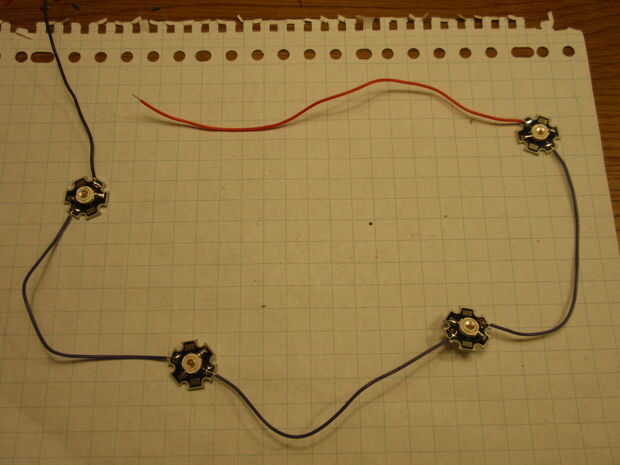
Conecte los leds en grupos de cuatro. Los leds necesitan estar conectados en serie para el conductor al poderles. 2 grupos de 4 leds conectados por lo que para una cadena de 8 leds, conectados en serie. Ambos grupos reúnen en la base dos veces, una vez a la cadena para arriba y una vez para conectarlos a la fuente de alimentación.
Coloque los leds en el anillo. Usé epoxy pegamento en cola los leds en su lugar.
Añadir el disipador de calor a las partes posterioras de los leds. Utilizar un montón de yeso térmico para pegar los disipadores de calor para los leds.
Probar los leds por lo que seguro que funcionan. No quiero descubrir que algunos leds no funcionan cuando ha cerrado el anillo. (en realidad, esto no sucede a mí)
Colocar todas las cubiertas superior con tornillos de cabeza avellanada M4. los tornillos se golpee en el ring. Hay apenas cualquier fuerza sobre los tornillos, así que no las tuercas son necesarias.
Prueba otra vez. Nunca puede estar demasiado seguro.
La base ya está terminada.

 (impresión 3D)")


")




