Paso 11: Lo que estoy haciendo para conseguirlo moviendo







Los problemas que debían fijarse:
- El regulador de tensión 7805 recalienta a temperatura ambiente a lava más rápido que... Ni siquiera sé una buena referencia para esto;
- La mayoría (todos) de los servos eran demasiado débiles;
- Algunas partes de la base eran demasiado débiles;
- La electrónica no encajan en la base.
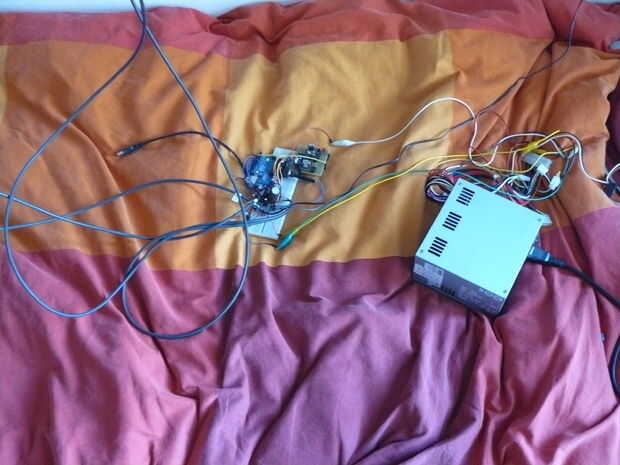
El 7805 tiene una solución simple pero práctica. Inserte la fuente de alimentación de PC. Fuentes de alimentación son los machos del mundo de la electrónica. Si ellos no soluciona un problema de suministro de energía, empezar a gritar y correr en círculos.
Para solucionar el problema de servo, ordené el servo difunto. Algunos de estos son el tipo de cosa que se utilizaban casi en Godzilla. Aquí es donde descubrí que analógico realmente no. Ir digital. Todavía no he recibido todo el servo. Pero ya he probado los de la base y el brazo principal. El brazo principal, ahora funciona. Necesitan los engranajes en la base de algunos trabajos.
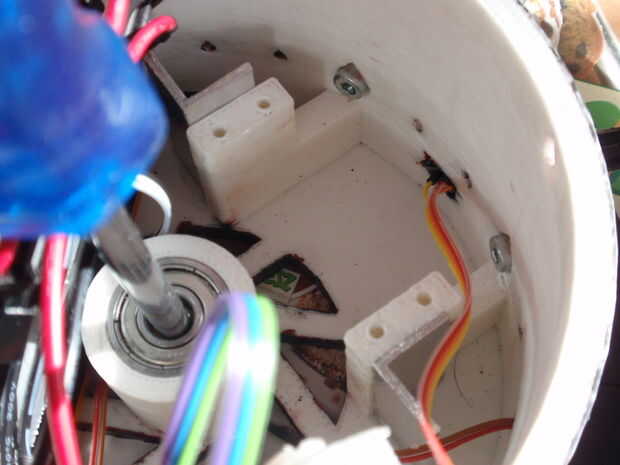
En la base, los engranajes se separarse y saltar. También la relación de los engranajes permitida una velocidad ridícula en el brazo. Rediseñé los engranajes para que tengan una proporción de 1:1. También añadí partes que separarse. El ensamble del engranaje ahora requiere 3 piezas impresas, 1 608 cojinete, cojinete de 1 624 y un tornillo de M4. Para la base sí mismo es demasiado débil, no miedo. Ligeramente reforzado (o que, dependiendo de cuando leas esto) algunas partes, pero la mayoría de mis fracturas fueron debido a mal impresora (en mi caso firmware antiguo PLA). Otras piezas fueron impresos más fuerte.
También hice un nuevo rediseño de la base, para alimentar y todo lo fuera de la base controlar. Esto resuelve un problema de espacio ridículo, permite mejor refrigeración y facilita el intercambio de componentes y electrónica, para no hablar de subir en el arduino será mucho más fácil. Inconveniente es que hay cables que salen de la base, y no es ya independiente.
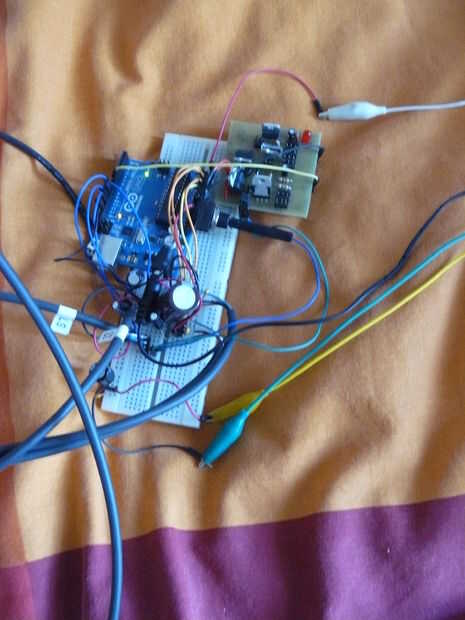
Obtener cada eje con el controlador. Porque hay 3 metros de cable en el lado del controlador y el lado de la lámpara, todo lo que contiene la placa es cables y condensadores. Cada alambre que va en alguna parte está conectado a un condensador. Mayoría de ellos ayuda.

 (impresión 3D)")


")




