Paso 4: Partes básicas








• Motores
• Ruedas y ejes
• Variador de velocidad
• RC Radio / receptor
• Las pilas
• Interruptor de encendido / enlace
• Arma el Motor (si se requiere el diseño)
• Regulador de la velocidad del arma (si se requiere el diseño)
• El cable de
• Los conectores
Todas estas partes se pueden encontrar en:
www.robotmarketplace.com
Piezas sugeridas:
Motores de accionamiento:
• Hadas – 100: 1 SRV Drive Motor (o similar)
• Hormiga – 100: 1 SRV Drive Motor (o similar) o FingerTech chispa serie
• Escarabajo – serie FingerTech chispa o Motor de la serie B
FingerTech plata chispa motores son motores grandes y tienen un montón de energía para un antweight. Algunos constructores usan en beeteweights con éxito también.
Ruedas / bujes:
• Hada y las ruedas de la serie Flite Lite w FingerTech Hub
• Hormiga – Lite Flite serie ruedas con Eje FingerTech
• Escarabajo – Lite Flite serie ruedas con FingerTech Hub o BaneBots ruedas/ejes
Variador de velocidad:
• Hada y FingerTech tinyESCs
• Hormiga – tinyESCs FingerTech
• Escarabajo – FingerTech tinyESCs o BaneBots 3-9
Al elegir que velocidad de controlador, elige primero el motor de la unidad y luego emparejar para arriba con un regulador de velocidad que puede manejar los amperios del motor.
RC/receptor de Radio:
Para los robots de combate el receptor de radio tiene que tener la liberación en todos los canales. Eso significa que si la señal se pierde, o se apaga la radio, y canales se apagarán y el canal de acelerador vuelve a su posición.
Sugiero la radio Spektrum DX5e con receptor Spektrum AR500, o si necesita un receptor más ligero con la Spektrum AR6110e. Sugiero estos, porque tienen liberación incorporada, hacerlas legales para el uso en robótica combate. También el paquete combo DX5e y AR500 es de sólo $100. Obtiene un radio y un receptor con la mejor tecnología en el mercado. Tienen gran variedad y prácticamente ninguna interferencia. También ya que es de 2,4 GHz todo lo que tienes que hacer es atarlo una vez (muy fáciles de hacer), y entonces no tiene que lidiar con los cristales de frecuencia. La mayoría de lo 72MHz (radios que usan cristales de frecuencia) radios y receptores son más caros que este, lo que es casi una obviedad. Pero, existe un sistema de marca GWS para alrededor $80. Seguro, usted puede ir para el sistema GWS y ahorre $20, pero no tienen tan buena de gama, tienes que llevar cristales de frecuencia diferente para la competición y no durará siempre. En cuanto a mí la única forma de ir es DX5e emparejado con el AR500 o el AR6110e.
Editar : spozman ha traído a esta radio: HK-T6A y este receptor: HK-TR6A a mi atención. Se venden por FingerTech y son legales para uso en robótica combate. También son 2,4 Ghz, pero casi la mitad del precio como el DX5e y el AR500. No puedo dar fe de lo bien que trabajan, pero que parecen estar perfectamente bien para un robot. Si estás en un presupuesto, sin duda ir a por esta radio y receptor, pero si no te importa gastar un poco más, luego ir por el DX5e y el AR500.
Baterías:
De robots insecto peso De polímero de litio (LiPo) las baterías son las más comunes. La razón es porque son tan ligeros. Pueden ser un poco caros, pero si toma buen cuidado de ellos pueden durar años de 5 – 20 (dependiendo de cómo y dónde se almacenan). No entraré todos los detalles sobre la carga y el cuidado de las baterías LiPo, porque hay muchos sitios web que puede explicarlo mejor que yo (sólo tipo "con seguridad carga descarga y almacenamiento de baterías LiPo" en un motor de búsqueda). Pero diré esto: no corta, porque se hinchan, prender fuego o explotar (ninguno de los cuales nunca me han pasado). Pero no deje desalentarte de usarlas, porque si usted sólo tiene que utilizar algo de sentido común las pilas va a estar bien.
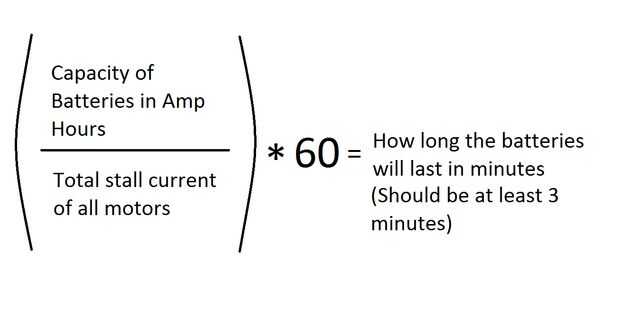
Al momento de decidir cuántos amperios hora necesita para baterías de suman la corriente de bloqueo de todos sus motores, a continuación, dividirán el valor de amperios hora de las baterías de la corriente de bloqueo total. Si se multiplica a ese número por 60 obtendrá las baterías duración en el peor caso (motor detenido) en minutos. Las baterías deben ser capaces de durar al menos 3 minutos.
* EDIT *: el Consejo anterior sobre tamaño de la batería es mal Consejo. Terminarás con un tamaño de batería que es mucho mayor que la necesaria.
Interruptor de encendido:
• Hadas – enlace desprendible
• Hormiga – enlace desprendible
• Escarabajo – Wyachi MS05 o enlace desmontable (si usted necesita para ahorrar peso)
Acoplamiento desmontable
• Un simple interruptor que se puede hacer por seguir los pasos en este video:
Wyachi MS05
• Un poco caro, pero muy eficaz el interruptor. Toma 4 vueltas con y llave allen para encender y apagar, lo que es poco probable que falle durante el combate. Te sugiero un enlace desmontable, porque es mucho más duradera, y hay menos posibilidades de que apagando durante el combate.
Motor de arma:
Recomiendo altamente los motores sin escobillas. Tengo un motor específico para sugerir, porque casi todos los motores sin escobillas son bien construidos, y vienen tan muchos diversos tamaños que sólo usted sabe qué tamaño usted desean para su robot. Si tuviera que sugerir una marca sería E-Flite. La razón por qué motores sin escobillas son mejores es porque no dibujan tantos amperios, son mucho más rápidos, y no reciben casi tan calientes. Tenía un motor cepillado consigue tan caliente que comenzó a fundir la montura plástica.
Regulador de la velocidad del arma:
Una vez que usted escoge un motor, mayoría de las veces habrá un controlador de velocidad recomendada en la página del motor. Si no, usted puede buscar a través de los controladores de velocidad en la Plaza de Robot si sabes que especificaciones necesita, o puedes dejar un comentario pidiendo que regulador usar y estaré más que feliz de contestar (generalmente dentro de un día o menos).
Alambre:
Cuando elegir cable ir cable de silicona de Decanos Ultra alambre, porque son más flexibles y pueden manejar más corriente por su tamaño de medidor. El cable es un poco más caro, pero merece la pena.
Como regla general para calibres de alambre:
-Beetleweight – calibre 14 a 16
-Antweight – calibre 16 a 20
-Hadas - > 22 calibre
Conectores:
Es bueno utilizar conectores para unir electrónica juntos, de esa manera es más fácil cambiar piezas si se rompen. Me gusta decanos tapones, pero cualquiera de estos conectores funcionará (siempre y cuando no hacia grande): conectores











")

