Paso 5: cableado





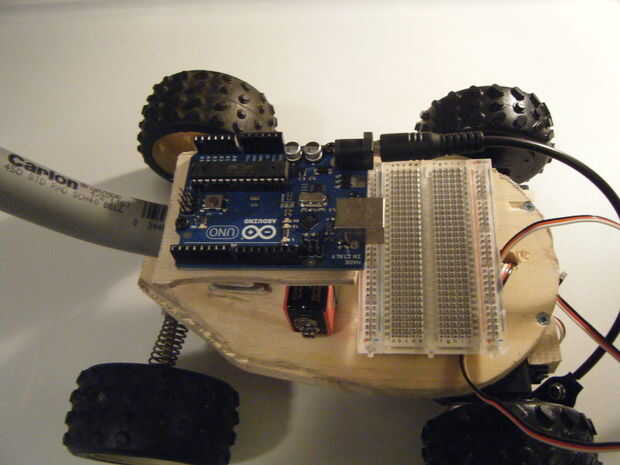



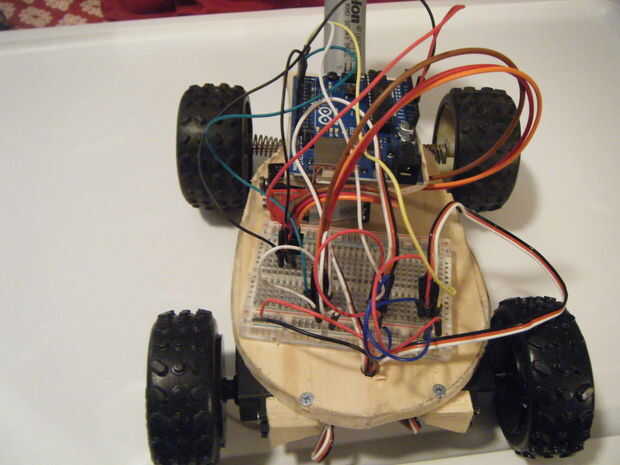
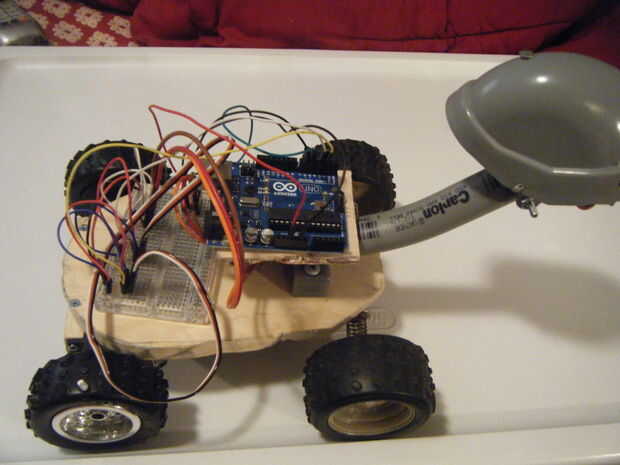











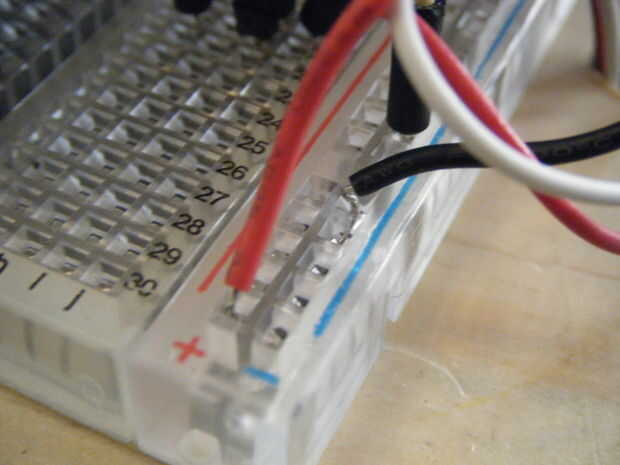
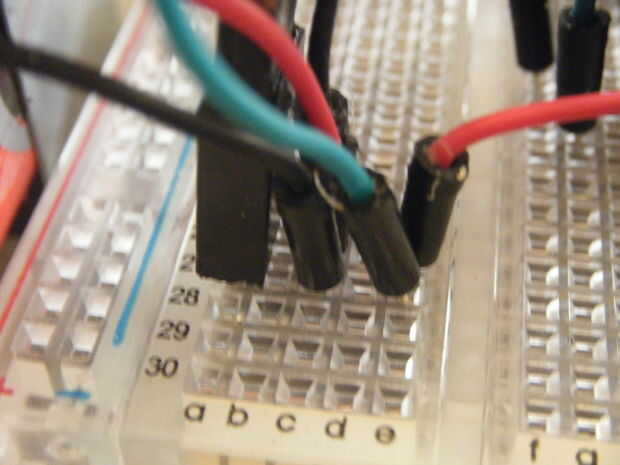

Conecte conductores de rojo del motor servo de la izquierda y la derecha el carril rojo y negro lleva al carril azul de la placa.
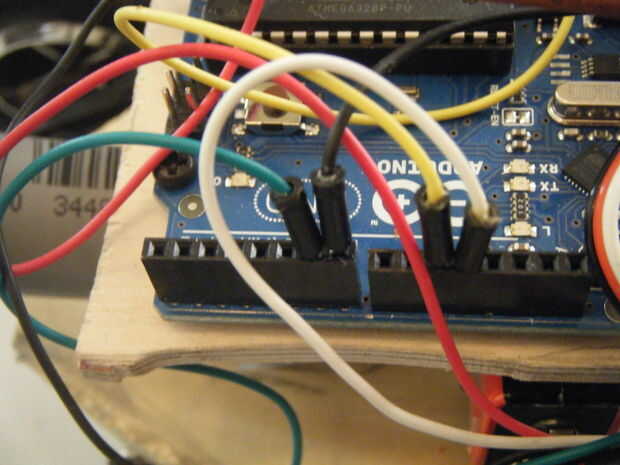
Cable blanco de izquierda del motor para el Arduino D-pin 11
Blanco de plomo al D pin de Arduino 10 del mismo motor
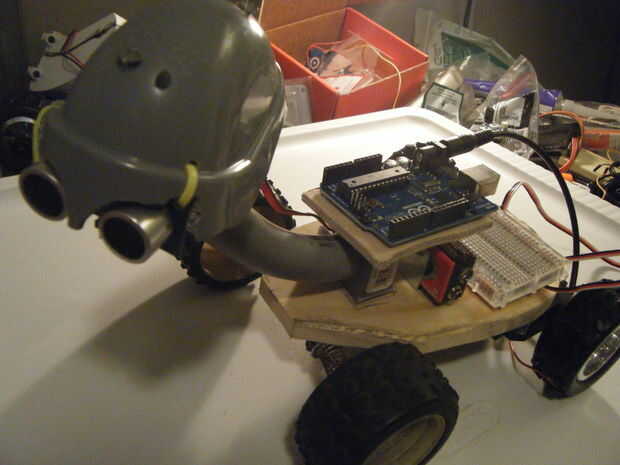
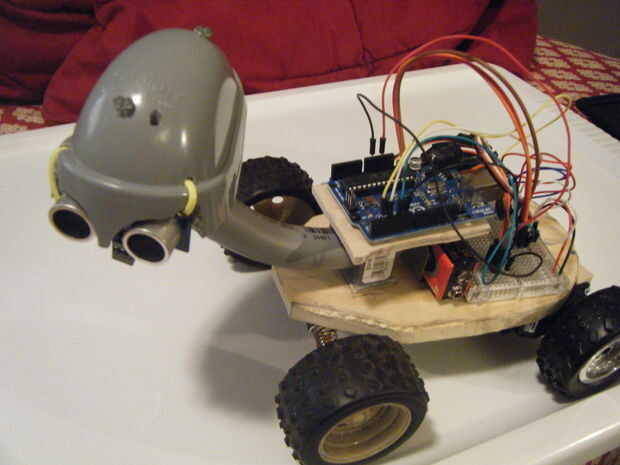
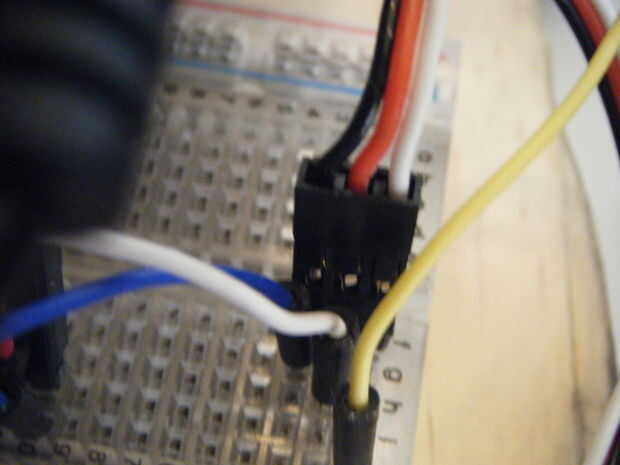
ping Motor: Brown es negativo (tierra)
Naranja es positiva (alimentación)
Amarillo es el cable de señal
Conecte el cable marrón al riel azul de la placa y el cable anaranjado al cable rojo de la placa.
Cable amarillo a la Arduino D-pin 6.
Sensor ping: conectar el pin marcado GRN en el sensor ping a terminal GRN de Arduino.
Conectar la clavija con terminal 5v en el sensor ping a 5v de Arduino.
y por último conectar la clavija con SIG para la Arduino D-pin 7.
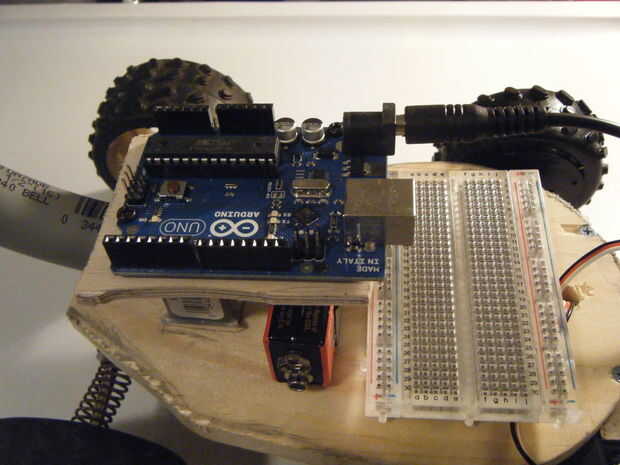
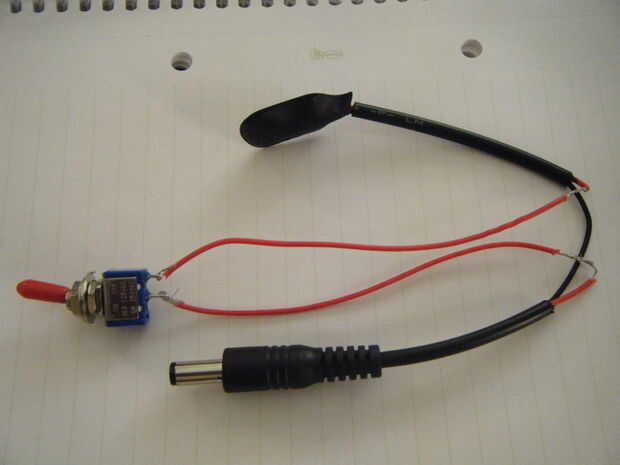
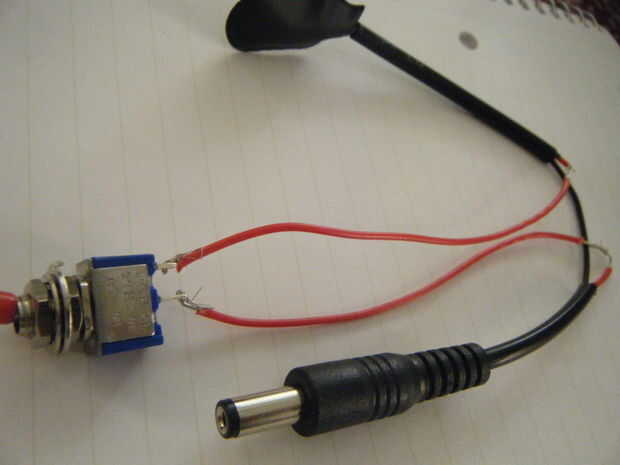
Instale la batería de 9v y titular.
Ahora agarra el interruptor SPST y un 8" pulgadas cable a cada terminal de la soldadura. Tome a la clavija de enchufe de 9v y corta el cable rojo a la mitad, luego soldar un cable desde el interruptor a un extremo de la clavija de enchufe y el otro cable del interruptor al otro extremo del gato plu.
Perfore un orificio de 1/4' en la parte posterior inferior de la carcasa e instale el interruptor.













