Paso 3: mecanizado






El interior diámetro de las ruedas deben ser abiertas en un torno para permitir que los motores a ser presionado en las ruedas. Mida el diámetro exterior de los motores y gire el diámetro interno de las ruedas aproximadamente 0.001-0.002 "ajuste menor de una prensa. La profundidad debe coincidir con la dimensión de la campana de motor outrunner. El núcleo de la rueda está hecho de un plástico duro y tiene tolerancia decente. Le aguanté las ruedas por el exterior de goma, en un mandril de seis mordazas e indicada en la cara de plástico.
Retire los conjuntos de campana eje tirando el anillo de retención del eje en la parte posterior del motor y dibujo del montaje de los rodamientos. Presione las campanas en las ruedas, poniendo presión en el borde de la campana (no el árbol).
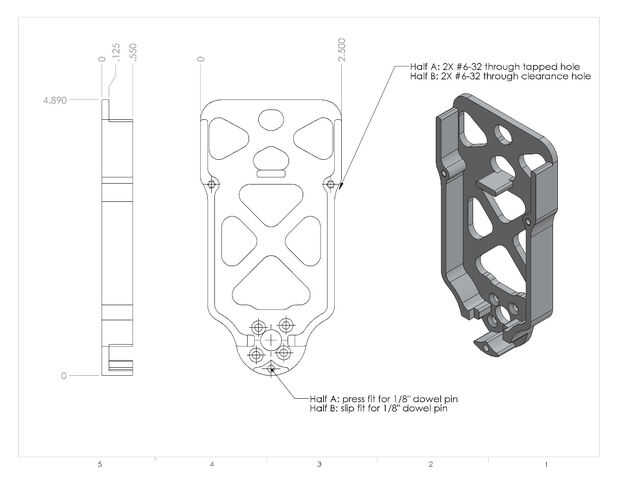
El cuerpo consiste en dos mitades idénticas excepto por los agujeros de perno de alineación y los sujetadores (véase siempre el dibujo). Las dos mitades son CNC fresado de 5/8"(1/2" también funciona pero robot será 0,1" diluyente) placa de aluminio. La parte de SolidWorks se proporciona para su uso con el software CAM de elección. Marqué el montaje orificios, orificio del pasador de alineación y sujeción en la CNC utilizando un taladro de centro antes de que las partes fueron separadas de la placa del motor. Las piezas se deben aplicarles y limpiarse. Luego completar la perforación, roscado y avellanado (esto también puede lograrse en el molino antes de que las partes se hayan retirado de la placa).







")





