Paso 10: La AI y el código de interfaz del componente
Evasión de otro robot tiene los mismos requisitos que atacar. Un extra adicional que se requiere para la evasión es tanto un reverso o lado frente a sensor para mantener el robot persiguiendo. También el robot podría mover en reversa.
Las capacidades autónomas del robot sumo sólo están obligadas a ser bastante básico. El código de control involucrado en la creación de la autonomía del robot debe ser capaz de hacer frente a las lecturas de todos los sensores a bordo y responder a las amenazas de una manera rápida y eficiente.
Para activar el robot realizar las tareas requeridas de atacar autónoma y evadir un reactivo se implementó la estructura del código. Esto dio lugar a un ágil robot que puede responder rápidamente a las acciones del oponente.
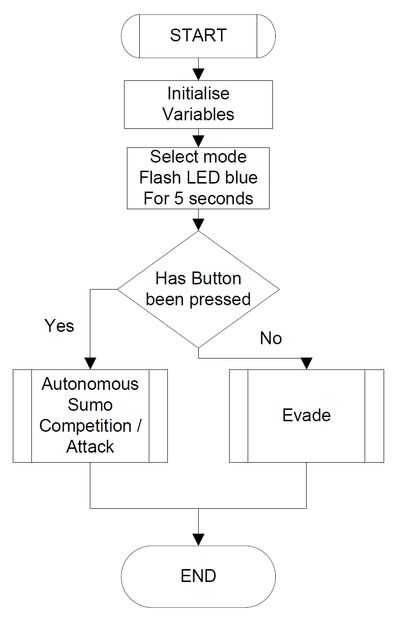
Cuando enciende por primera el robot de sumo entra en un estado de selección de modo, identificado por el indicador azul intermitente LED, este estado dura 5 segundos. Este estado permite al usuario seleccionar entre un modo de evadir o una competición de Sumo autónomo / modo de ataque.
El robot automáticamente en el modo de evadir si el usuario no pulse el botón rojo durante el estado de selección de modo. Una vez en evadir el indicador LED parpadeará el modo verde, mostrando que el robot está esperando para su comando de arranque.
Para seleccionar la competencia Autónoma de Sumo / ataque modo el usuario debe presionar el botón rojo durante el estado de selección de modo. En la competición de Sumo autónomo / ataque voluntad de modo aprendizaje el LED flash rojo, indicando que el robot está esperando para su comando de arranque. Una vez el botón de inicio prensas que los respectivos colores de LED parpadeará rápidamente durante 5 segundos, durante este tiempo el usuario debe mover más de 1,5 m de la arena. El LED se convertirá en el color sólido y el robot comenzará su modo seleccionado.
Eludir de modo objetivo
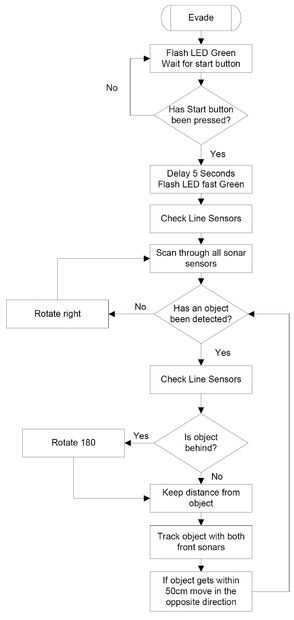
El objetivo principal del modo de evadir es evitar el contacto con un objeto de persecución, manteniendo dentro de los límites de la arena. Se trata de lograr localizar el objeto y luego sigue con los dos sensores ultrasónicos frontales. El objeto de la persecución se realiza un seguimiento sobre el terreno hasta que dentro de 50cm. El robot de sumo, luego se mueve hacia atrás tratando de mantener la distancia de 50cm. El robot sigue moviendo hacia atrás hasta que toque la línea de límite blanco, momento en el que rota del objeto perseguir y retrocede hacia el centro de la arena. El robot detecta entonces el objeto nuevo y se repite el proceso. En las imágenes se muestra un organigrama del modo de evadir.
Meta de modo de ataque
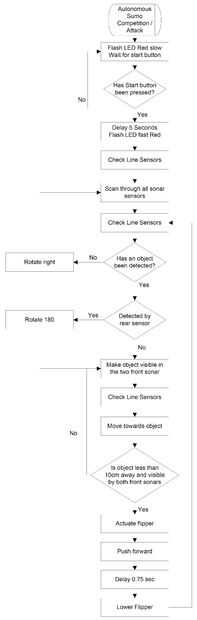
La meta para la competencia autónoma del Sumo modo de ataque es el empuje o tirón al oponente fuera de la arena, permaneciendo dentro de la arena. El robot de sumo busca objetos usando sus sensores de ultrasonidos. Una vez que un oponente se encuentra que el robot gira hasta que el oponente es visible en sus dos sensores delanteros. A continuación, carneros a remite y trata de empujar al oponente fuera de la arena. Entonces el flipper activa teniendo en cuenta las siguientes condiciones:
1. el oponente es visible a los sensores ultrasónicos frente
2. el oponente está a 10cm
A menos que ambas de estas condiciones se cumplen, la aleta no se accione. Una vez que ha actuado la aleta, el robot sigue ram hacia adelante, luego baje luego aleta después de 0,75 segundos. Luego se repite el proceso si es necesario. Un organigrama de la competencia Autónoma de Sumo / modo de ataque se muestra en las imágenes.
Como se indicó anteriormente, las funciones tanto evadir los ataque del robot sumo son puramente reactivas. Si se detecta un objeto, se realiza una acción. Se eligió un método reactivo debido a su rápida respuesta, efectividad y facilidad de implementación.
Interfaz con sensores de ultrasonidos I
Este tutorial le guiará aunque como interfaz con los sensores de ultrasonidos HC-SR04.
Interconexión telémetro ultrasónico con Microcontroladores AVR, AVR Tutorial
Los sensores de línea pueden conectar simplemente a una entrada digital de la MCU AtMega128. Entonces el MCU puede leer los sensores de estado actual.
Interfaz con el ShiftBrite
El ShiftBrite fue controlada utilizando un método llamado bit de autoagresión. El documento adjunto contiene código de ejemplo de trabajo para interactuar con el ShiftBrite.
Interfaz con el controlador del Motor
El regulador del motor sólo requiere dirección alto-bajo digital de señales y señales PWM. Que un sencillo de implementar con la AtMega128.
")




")



 utilizando un Arduino")



