Paso 1: componentes
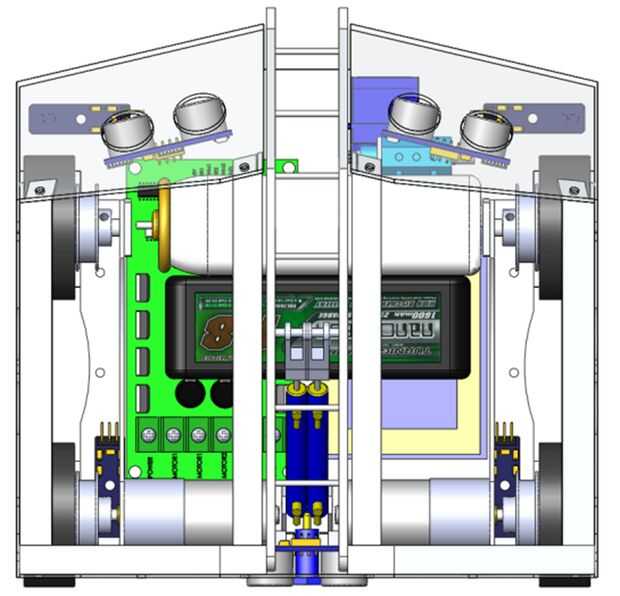
Elementos de costo
2 x motores 47:1 motorreductor Metal 25Dx52L mm HP
1 x Motor 10A puente H Dual DC Motor Driver regulador / fuerte de alta potencia de frenado
4 x polea eje FingerTech polea dentada 26T
2 x correa Correa FingerTech 276 mm (92T)
4 x ruedas de Dave Brown Flite Lite 2"
4 x línea sensores TCRT5000 módulo línea seguimiento Sensor fotoeléctrico
3 x Sonar HC-SR04 sensor ultrasónico telemétricos de módulo
1 x batería ZIPPY Flightmax 1300mAh 3S1P 25C 15
2 x cilindro neumático actuador de aire 25 mm
1 x cilindro de aire de tanque 100CC
1 x Interruptor Servo operado aire retrae actuador neumático (de aire arriba/abajo)
1 x válvula unidireccional válvula de recarga de aire unidireccional
1 x tubo aire contrae tubería D3x1.7mm x 1m
Non-Cost Items USE
Chasis de aluminio hoja 50cmX50cmX1mm___
Soporte de aluminio L-sección ___Chassis
Super montaje de Glue___Sensor
Tarzán Grip___ rueda montaje de polea
Pop Rivets___ chasis
Doble cara Tape___ aislamiento, montaje de componentes
Aislamiento de calor Shrink___
Wires___ interfaz de conexión con los componentes
Corte de tensión de alimentación principal de Switch___
Button___ de selección para seleccionar entre los modos de ataque/evadir
Conexiones de cables de componente Solder___
De control del robot ___Sumo microcontrolador ATMega128
10 cables IDE Plugs___ conectar los sensores al microcontrolador
Microcontrolador plug___ de poder entregar energía al microcontrolador
Zip Ties___ mantenga la neumática en el lugar y orden electrónica
Cilindro neumático de Bands___ soporte elástico
Pernos de rueda delantera m3 cap screws___ mantener en lugar
Regulador del motor de Transistor___ interruptor encendido y apagado
Resistor___ límite de corriente del transistor
interruptor neumático de 9g Servo___Control
Microcontrolador hembra Crimp Pins___ conectar al controlador de motor
Aislamiento de Housings___ de Pin Crimp sobre alfileres de engarce
Aislamiento eléctrico Tape___
servo de 0,8 mm acero Wire___ enlace al switch neumático
barra conexión de brazo de ___Flipper cuadrada de 6mmX6mm
Brazo de 20x15x3mm___Flipper de hoja de aluminio
")




")



 utilizando un Arduino")



