Paso 9: Par de pierna frente de Qudruped


Por la pierna:
Piezas de la pierna
No. del artículo. LV01 x 1
No. del artículo. LV09 x 2
No. del artículo. LV14 x 2
No. del artículo. LV26 x 1
Conectores:
No. del artículo. SC804 x 3
No. del artículo. SC802 x 1
No. del artículo. AD33 x 2 (conector color beige puede reemplazarse por uno azul).
_________________________________________________________________________________________________
Utilice la pistola de pegamento para montar la goma verde en el extremo de la garra. En esta foto aunque no es tan bien visto una goma regular
banda ha sido cortada en varias tiras de igual longitud y estas tiras han sido colas.
** Consejos para el montaje de las tiras:
-En cualquiera de los extremos de una banda determinada, asegúrese de que no sólo queda cola entre las patas de plástico y debajo la superficie de la stip. También agregar el pegamento que ontop de la faja y correr hacia el plástico. La idea es que la tira está cubierta de pegamento por lo que se lleva a cabo en el lugar de todo.
_________________________________________________________________________________________________
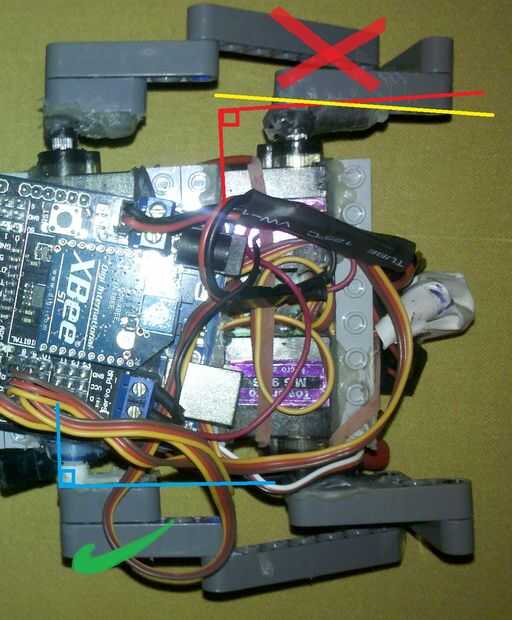
Utilice la pistola de pegamento para montar los cuernos servo a la derecha y la izquierda.
** Consejos para montar los cuernos servo:
-Asegurar la orientación correcta de la horn de servo.
-Asegúrese de que el orificio del tornillo servo horn se alinea con el centro del agujero en la pieza de la pierna se pega al.
-Cuándo pegar, aplicar con moderación alrededor del orificio de tornillo de horn de servo. Si cola excesiva se utiliza aquí es probable que se tapan la zona donde estaría el tornillo.
-El objetivo es al mirar el pedazo de pierna y el servo, son 90 grados entre sí:
Esto parece el cuerno del servo < = O, O (agujero de tornillo) con moderación ha aplicado pegamento como el anterior. Sin embargo se aplica pegamento excesivo a lo largo de la longitud del cuerno < = la idea aquí es el pegamento realmente debe elevar la parte del cuerno que el cuerno del servo funciona adyacente y está en línea con el pedazo de pierna.
^ ^ ^ El párrafo anterior se explica mejor al referirse al cuadro 3.
-Agrega el pegamento del excesivo sobre el cuerno, y sobre la parte exterior de la pieza de la pierna, esto aumenta fuerza y durabilidad.












