Paso 2: mecánica
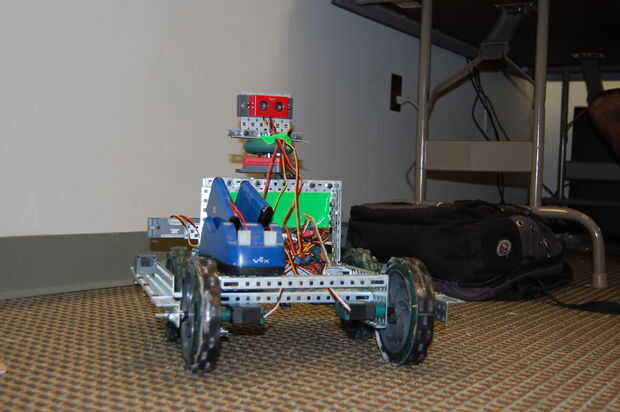
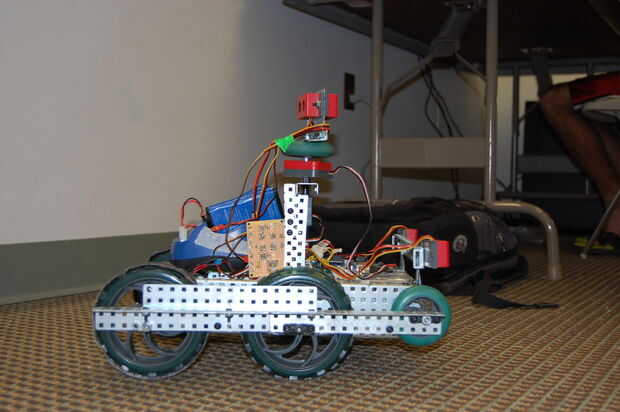
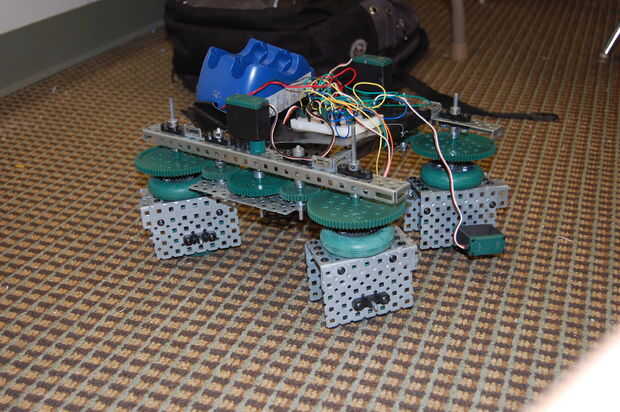

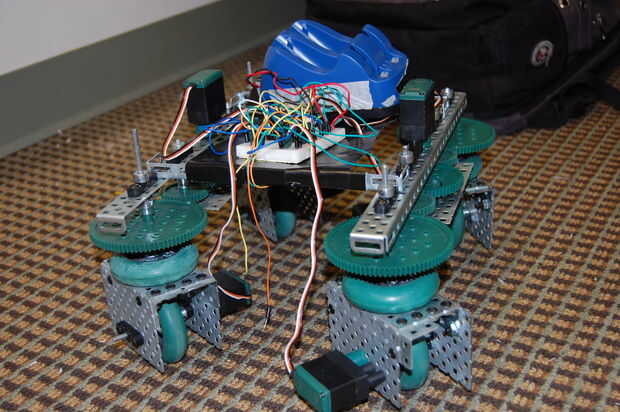
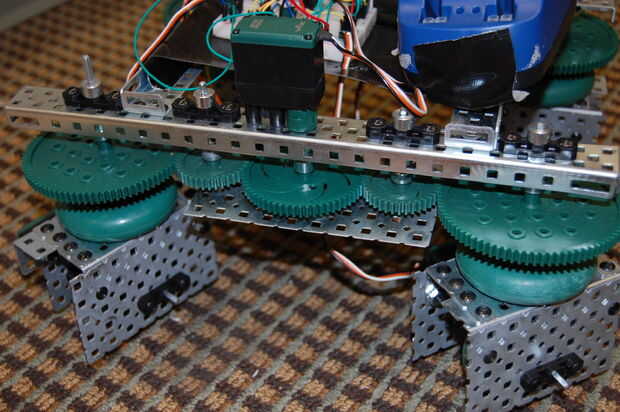
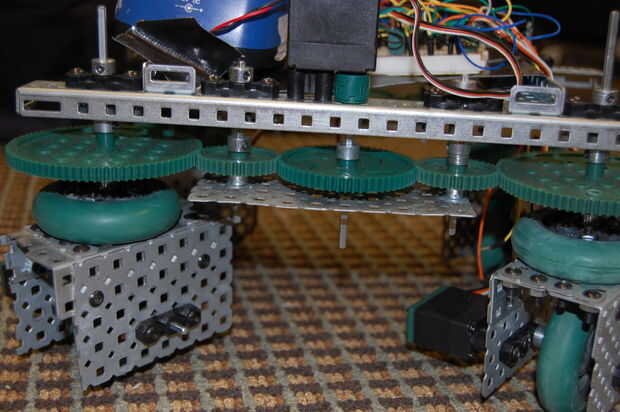
A continuación, tenemos que añadir los servos por debajo de la base de que hay suficiente espacio en el exterior para fijar las ruedas. Se utilizó una impulsión de cuatro ruedas. Dependiendo de qué tan fuerte son sus servos, puede utilizar dos ruedas si quieres. Sin embargo, debe haber suficiente espacio sobre la base para el Arduino, PCB y la batería.
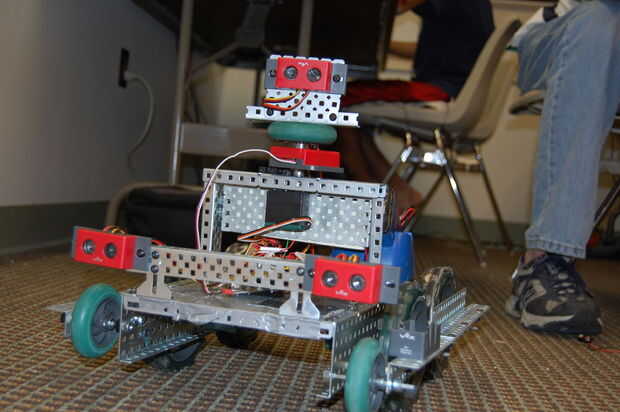
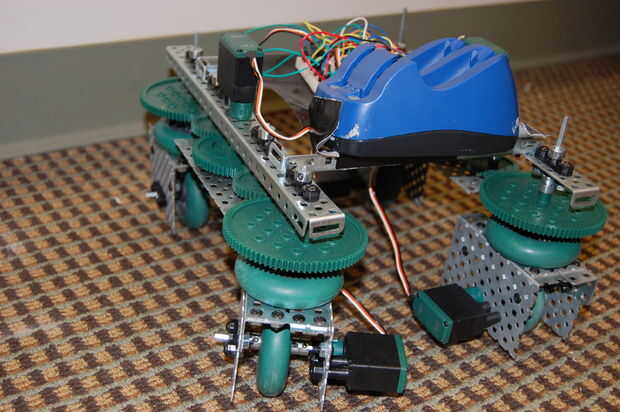
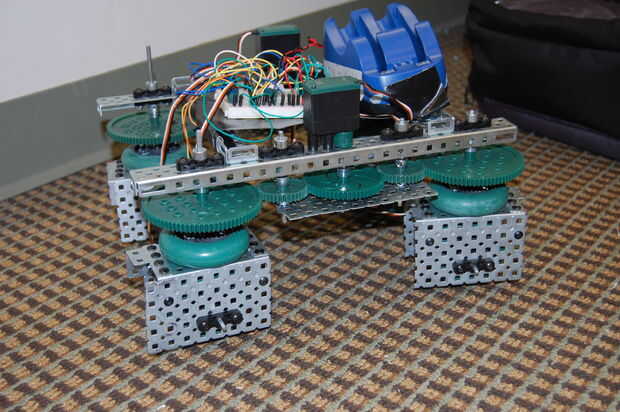
A continuación, agregue las ruedas en los servos, hemos añadido refuerzos fuera de las ruedas para asegurar al otro lado del eje y evitar que se salga. Las dos ruedas adicionales en la parte delantera son elevadas por lo que si el robot funciona en una acera o escalón, serán capaces de subir encima de ella. Ponemos cinta aislante en las vuelta dos ruedas para reducir la fricción, por lo que resulta más fácil.
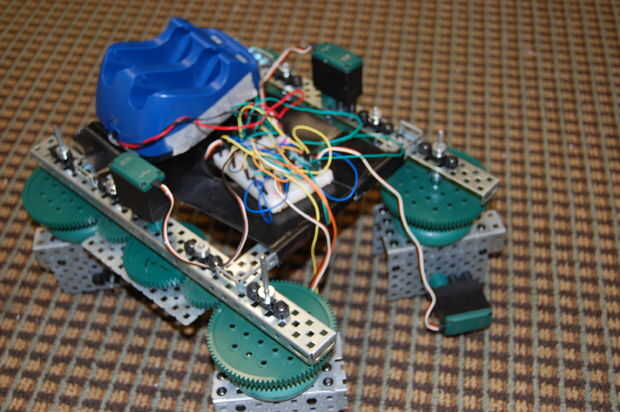
A continuación agregamos un soporte de la batería. Para nosotros, era fácil tomar un Vex cargador y modificarlo para que transmite la potencia a las ruedas en el lugar de carga de las baterías. Saque la placa de circuito interior y desoldar los cables positivos y negativos que van hasta el puerto de carga. A continuación puede soldar entre sí los cables negros de los dos terminales y soldar entre sí los cables rojos también. A continuación, suelde un cable al cable rojo y negro. Esto se puede conectar directamente a su PCB. Fotos de este soporte de la batería están en la sección de electrónica.
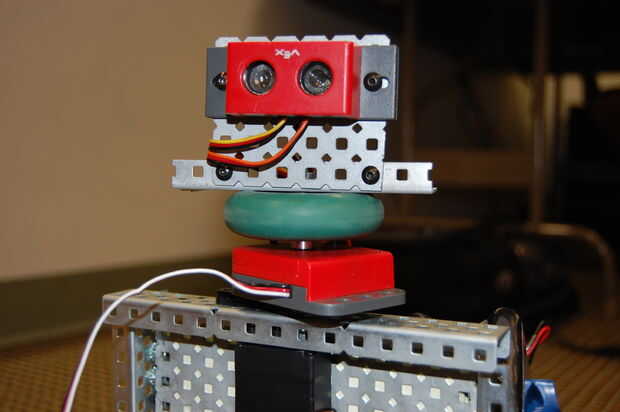
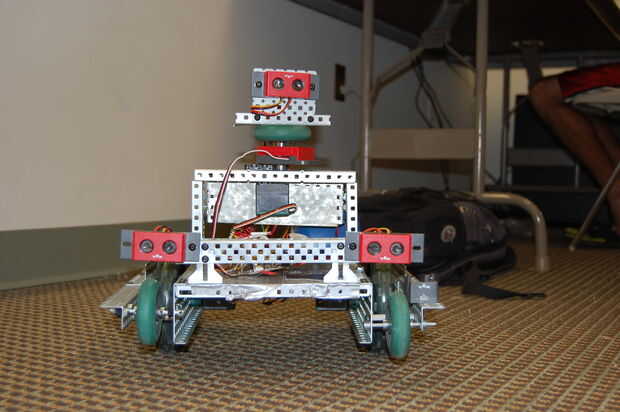
A continuación, hacer un montaje en la parte delantera del robot para los sensores ultrasónicos. Si quieres ir más allá, puede hacer un montaje en el centro para un sensor ultrasónico giratorio.
Hemos incluido imágenes de nuestro diseño de Mark II que es una impulsión de cuatro ruedas estándar así como nuestra marca III de diseño que cuenta con una muela de cangrejo. Cangrejo de la rueda es más complicada de programar, pero permite holonómico en coche.


")



 Stage1Model2")


")
")
 /w Arduino")

")