Paso 7: Fabricación de PCB











Desarrollo y grabado de placas de circuito impreso en casa implican productos químicos que son peligrosos si se usan incorrectamente. Es importante usar siempre guantes y trabajo en un área bien ventilada como fuera. Lea siempre las hojas de datos materiales y siga las instrucciones que se ofrecen con estos productos!
Desarrollo de la placa de circuito
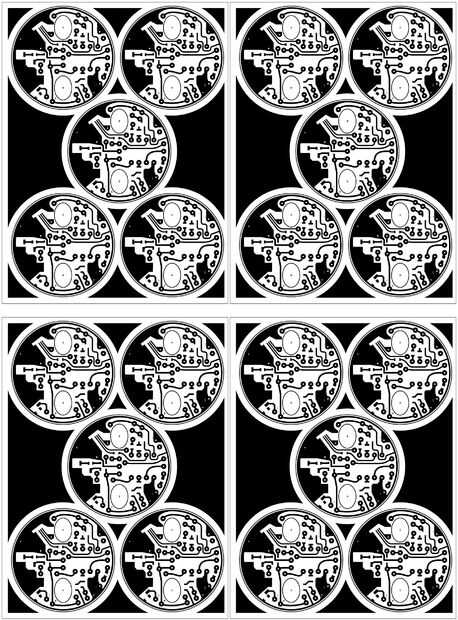
Después de dibujar el circuito una foto positiva fue creada por imprimir el diseño sobre una película transparente. Más imprentas serán capaces de hacer esto, pero también puedes comprar una caja de las transparencias y hacerlo en casa. Se hacen diferentes transparencias para impresoras láser y de inyección de tinta, asegúrese de comprar el tipo apropiado. También, asegúrese de imprimir a escala 1:1; Olvidó esto y grabada la primera junta antes de darse cuenta de que el diseño era demasiado pequeña y necesaria para empezar de nuevo.
Mientras que en un cuarto oscuro he quitado el plástico protector de la placa de circuito previamente sensibilizada y había alineado el positivo en la parte superior. Para mantener todo en su lugar puse una pequeña placa de vidrio sobre el positivo. Las instrucciones que vienen con la palabra de Consejo para exponer la Junta 1 pie bajo una bombilla de 100 vatios durante 10 minutos, pero siempre he necesitado ir a por lo menos 12.
Había preparado la solución de desarrollo alrededor de un minuto antes de terminar la exposición. La solución es una mezcla de 1 parte desarrollo concentrado con 10 partes de agua tibia . Agua fría detiene el proceso de desarrollo y evita que más desarrollo. Si en este punto, agua fría esencialmente arruinaría la Junta.
Después de 12 minutos de exposición coloqué la placa en una tina plástica con la solución de desarrollo caliente. Mecía suavemente la tina para mantener la solución moviendo. El desarrollador arrastrados rápidamente las áreas de verde película sensibilizada que fueron expuestas a la luz dejando los rastros de circuito. La Junta se ejecute bajo agua fría para completar el desarrollo.
Grabado de PCB
A continuación la junta fue colocada en un recipiente de tupperware pequeño junto con una mezcla de cloruro férrico y agua tibia. Otra vez sacudieron la tina para mantener el flujo de la mezcla. Después de unos minutos el cobre expuesto era comido lejos dejando sólo el diseño del circuito protegido y el tablero de fibra de vidrio.
La capa fotosensible restante fue fregada apagado al tablero de circuito con quitaesmalte y un cepillo de dientes. Es importante limpiar bien la Junta. Si no está perfectamente limpia podrá ver las zonas sucias, después de que sea demasiado tarde.
Través de los orificios de perforación
Estoy seguro que hay un estándar en lo que deberían ser agujeros de tamaño PCB, pero no saberlo solo perforé los con la broca más pequeña que tenía en mano.
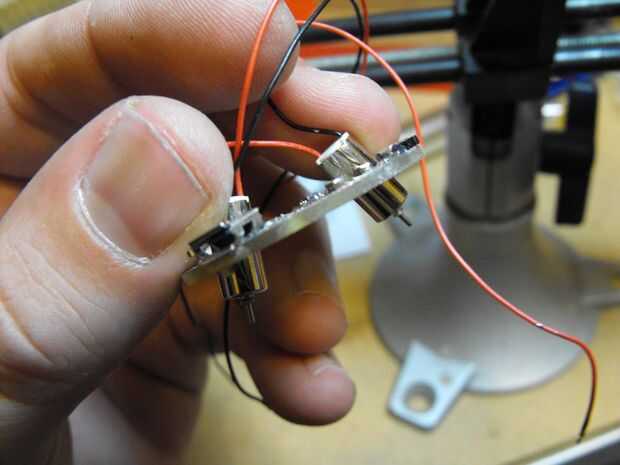
También debían taladre dos orificios más grandes para los dos motores. Estos agujeros de perforación fue bastante fácil con un taladro miniatura, pero también debían orientarse para permitir que los motores que actúan como ruedas. Para ello usé un pequeño archivo para formar la Junta de fibra de vidrio. Durante esta presentación me aseguré de poner los motores en los agujeros y el ángulo de la prueba hasta que lo conseguí. Es fundamental que estos agujeros se presentó en el mismo ángulo exacto para que los motores se sentaban correctamente.
Poco esta había jodido y los motores sat parciales, haciendo que los ejes de la tierra en diferentes puntos de contacto. Esto cambió su velocidad y un motor que acabó siendo más rápido el otro y en el tramo largo esta diferencia hace que el robot desviarse hacia un lado. Es todavía fácil de controlar y realmente no importa que no es perfecto, pero en el futuro voy a ser mucho más preciso al ajustar motores. Incluso puedo usar un transportador.
En los cuadros de proceso usted notará que hay algunos componentes ya soldadas a la junta antes de que se perforan los orificios del motor. Había cometido otro error y se olvidó de perforar estos agujeros antes de que empecé a soldar y tuvo que volver atrás y perforarlos.
Los rastros de estañado
Estañado hace soldar los componentes superficiales del montaje mucho más fáciles y protege el cobre de oxidación. Para ello usé un producto llamado Tinnit que compré en kit.
Comencé a taladrar todos los agujeros y limpiando cuidadosamente la junta con el removedor del pulimento de clavo más. Otra vez es muy importante hacer un buen trabajo de limpieza de la Junta de. No hacerlo en éste y se puede ver claramente dedo imprime en los rastros. > _ <
El concentrado seco mezclado con agua tibia y cocinados en el microondas hasta alcanzar unos 140° F. La Junta se colocan en una bandeja plástica con la solución de estaña y empujaban cada 5 minutos. Después de aproximadamente 20 minutos se convirtió en plateado los rastros de cobre con una capa micro-fina de estaño brillante. Finalmente, la Junta se limpió luego con amoníaco para eliminar el residuo de estañado. La solución restante de estañado fue vertida en la botella para ser reutilizados posteriormente.
Una vez mezclado Tinnit solo dura 6 meses. A menos que planee unas docena placas de estañado en un futuro cercano, es conveniente mezclar en pequeñas cantidades. Para ello necesitarás una pequeña escala peso concentrado en polvo y algo para medir líquidos. Dividí mi concentrado en cuatro lotes más pequeños, que me tenga en el negocio de tinnin para los próximos dos años.







")



")

