Paso 1: Cuerpo 123D diseño y la fabricación de la cáscara


Elegir un Material
Es importante elegir un materialantes de que empezar a trabajar en un modelo como cada material tiene distintas pautas que debe seguir mientras está diseñando. Los materiales varían en el espesor mínimo de pared, tamaño del detalle mínimo, flexibilidad y otras propiedades. Algunos materiales son más débiles que otros, modelos grandes de ellos pueden necesitar estructura interna para soportar el peso.
Elegí tener la cáscara para el Pingbot impreso del Plástico fino Durable. Este material es lo suficientemente fuerte como para ser utilizado como un prototipo de trabajo y su más mínimo detalle es un minuto.2 mm. Es más costoso que otros materiales, pero puesto que el costo de un modelo se determina parcialmente por su volumen, la cáscara era increíblemente barata han fabricado. Todos sumaron, utiliza menos de 1/3 centímetro cúbico de material.
Creando el modelo 3D
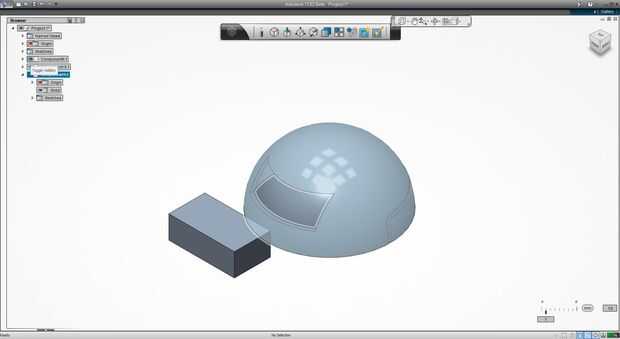
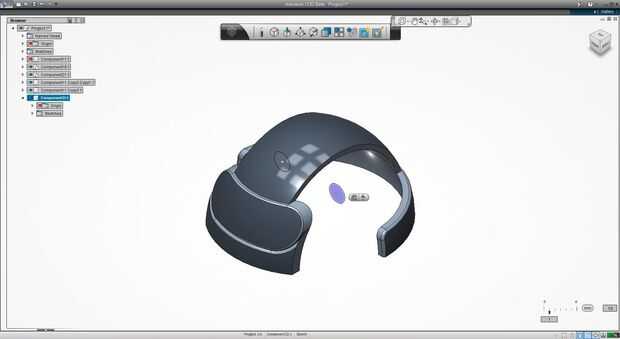
Aunque fue impreso como una pieza sólida, el modelo 3d fue hecho de componentes separados que se juntan para hacer un hemisferio. Esto era necesario ya que permite a los bordes de cada una de las piezas a ser redondeado.
Para empezar he creado un hemisferio hueco con un espesor de pared de 1mm. Luego copiado/pegado la carcasa original, nuevas formas y sacó estas nuevas formas a restar (intersección) del hemisferio. Después de completar todas las partes biselado los bordes para crear las costuras. He incluido un par de fotos del proceso.
Diseño shell de este robot era importante no olvide añadir los agujeros para los componentes que necesitan ser accedidos desde el exterior. Para el conector USB y micro-switch utilizo el diseño PCB junto con hojas de datos de los componentes para determinar dónde y cuánto, los orificios de acceso deben ser. También he añadido algunos agujeros en la espalda para ayudar a dejar salir el sonido por el altavoz peizo (el orador un montón alto y estos agujeros fueron probablemente no es necesario).
Carga y fabricación
De un modelo para imprimir, todos los componentes por separado necesitan ser soldado con autógena junto para crear una pieza sólida. Una vez hecho esto puede ser guardado como un archivo STL y cargado para la impresión y distribución. (Usted necesitará iniciar sesión en el 123D para guardar como un STL).
Este video es del Connex objeto máquina fabricación 3D, que es probablemente lo suficientemente cerca para el modelo de máquina usada para crear el shell de Pingbot. Demuestra cómo la máquina imprime el modelo en capas junto con un material de apoyo. Cuando la fabricación es completa el material de apoyo es arruinado, dejando la pieza final.







")



")

