Paso 6: Diseño eléctrico
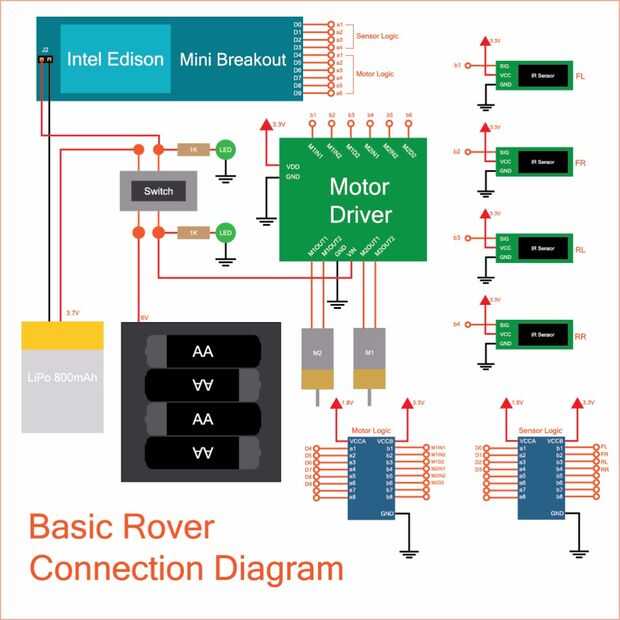
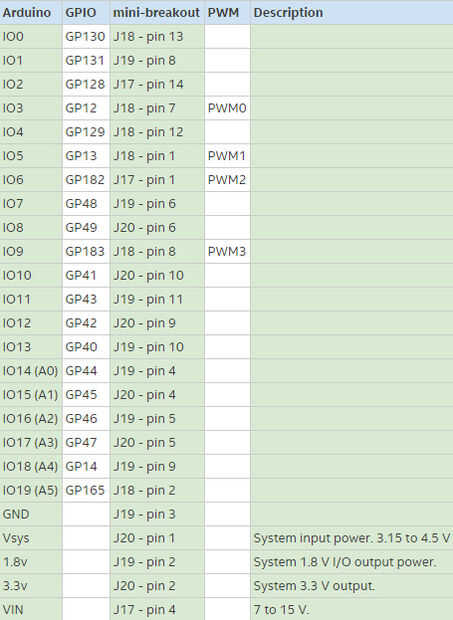
Es un híbrido esquema/diagrama de cableado del robot. También he unido las etiquetas pin para cartografía e identificar las conexiones apropiadas en el tablero de arranque de Edison.
Fuente de alimentación
El Rover tiene dos fuentes de alimentación separadas, una para la lógica y la otra para la potencia del motor. Mientras que las pilas AA proporcionan un montón de corriente para alimentar los motores y la otra electrónica, la salida de 6 voltios es demasiado alta para el Edison directamente y demasiado baja para ser regulados por los circuitos de alimentación a bordo. A pesar de esto, tener fuentes de alimentación separadas resulta para ser beneficioso ya que esto reduce el ruido eléctrico de la EMF generada por los motores. El Edison tiene circuitos de carga de polímero de litio incorporado, así que esto hace accionar la lógica fácil. Edison convierte el 3.7V voltaje nominal de la batería a sus tensiones necesarias para el sistema y proporciona un limpio 3, 3V y 1.8V fuente de alimentación para el resto de componentes. Dos LEDs verdes conectan a las fuentes de alimentación separadas y permiten la rápida confirmación de que todo tiene un montón de jugo.
Controlador
El Edison funciona el show para este robot. Es rápido, pequeño y tiene montones sobre montones de memoria para configuración sin fin. Mientras lo estoy usando sobre todo como un microcontrolador, es realmente un x86 incorporado una computadora con Linux! El desglose de Edison tiene un montón de GPIO para conectar los componentes.
Sensores de
Cuatro sensores de distancia IR aportar para el robot. Cada salida una señal baja lógica cuando el objeto es detectado en 5cm o menos. Elegí estos porque son sencillo, pequeño y barato!
Control del motor
Los motores son cada uno controlados por completo recomendados MC33926 que es un puente H algo elegante. Estos son clasificados para el mucho más corriente de los motores puede dibujar, que significa nunca funcionará caliente y puede ser utilizado para más grandes motores de controlador en el futuro. Puede utilizar un motor más pequeño, más barato para estos motores, pero Desconfíe de ejecutar en sus límites!
Motores
Dos motores micro-metal conducen la rueda base. Estos son relativamente bajo voltaje pero proporcionan suficiente par para conseguir que el robot corriendo bastante rápido. Estos son conectados directamente a la Junta de controlador de motor.
Cambio nivel de lógica
Gestión GPIO de Edison en un 1,8 nivel de lógica, mientras que los sensores y controlador de motor necesitan al menos 3, 3V. Estos desplazadores cuidar de traducir la lógica de Edison con el resto de la Junta. Las fuentes de 1.8V y 3.3V vienen directamente de la Junta de arranque a través de cabezales.













