Paso 3: Programación IDE de Arduino
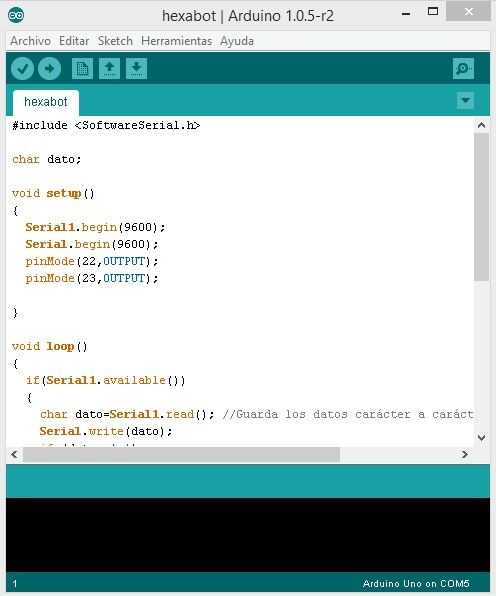
En esta etapa se desarrolla en el software acciones IDE de Arduino por el robot. Es el código generado. Código de Ino entender la continuación del microcontrolador en la placa Arduino. en la figura se observa 4 interfaz de descargas.
En esta etapa 36 desarrolla líneas amongwhich destaca línea 7 código: "Serial1.begin (9600);" el conjunto de las instrucciones para la comunicación del microcontrolador con el módulo Bluetooth.


