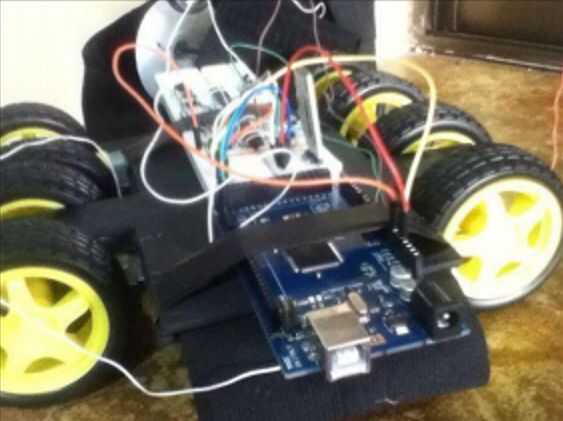
Este proyecto consiste en la construcción de un robot móvil en un protoboard utilizando una plataforma de hardware libre Arduino. Este robot es capaz de subir y bajar una palmera, que acción será controlada por una comunicación Bluetooth entre el robot y la comunicación de Smartphone. El robot tiene elementos básicos de la robótica, material reciclable, programación de acciones como subir, parar y bajar. El Arduino Uno actuará leer puerto serial Bluetooth recepción de módulo enviado por el Smartphone para la interpretación y aplicación de medidas concretas.


