Paso 6: Montar la culata.





Ahora que ya tenemos las piezas que necesitamos, ahora podemos empezar Asamblea. El director es un buen punto de partida, ya que alberga una buena variedad de electrónica. Una vez que entienda cómo montar una parte, debe ser relativamente sencillo montar el resto. Debido a esto, voy a describir ensamblaje de la cabeza en gran detalle mientras que siendo menos detallado para las otras partes. Otra vez, recomiendo que mirar el actual modelo de CAD de Rhino al ensamblar el robot, ubicado en la carpeta de Halley CAD.
Comenzar por recoger las piezas necesarias para la cabeza, que incluyen:
- servomotores de x 1
- AUVIO altavoz
- Teléfono (esto será desmontable)
- Todas las piezas acrílico asociadas.
- Surtido tornillos, arandelas y tuercas.
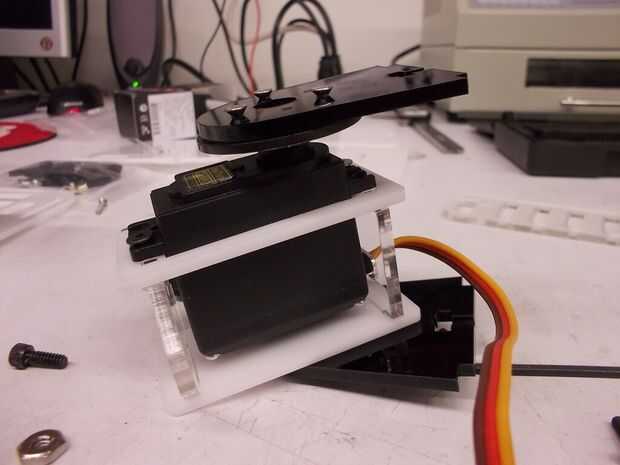
Yo empezaría con la construcción de la "mandíbula" del robot, donde se encuentra el altavoz. Inserte las baterías en el altavoz y asegúrese de que funciona. Utilice los tornillos de tamaño 40 para sujetar piezas, junto con las respectivas tuercas y arandelas. Tenga en cuenta que el cable del altavoz debe colgar fuera del agujero en la pieza de acrílico que mantiene en su lugar, y hay un agujero para el botón en el acrílico de lado. Fijar la placa frontal.
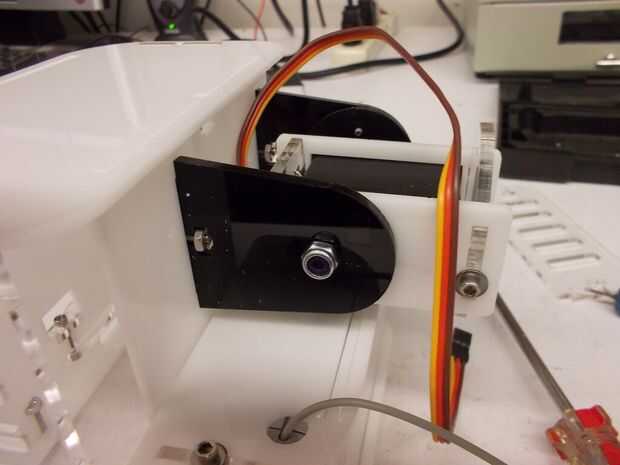
Ahora crear el cuello del robot. Esto debe tener 1 servomotor para el cabeceo. Utilice los tornillos de gran tamaño 36 y la tuerca Nylok para la articulación real. Fije a la placa inferior en la cabeza. Después de haber completado este paso, conectan el resto de la cabeza. En este punto, podrá insertar el teléfono Android en la cabeza (la cabeza está diseñada para que fácilmente puede insertar y quitar el teléfono).
Consejos de la Asamblea General (para todas las partes):
- Dependiendo de donde usted ordenó el acrílico y cómo era corte del laser, puede ser demasiado apretado o demasiado flojo. Si está demasiado apretado, rastrillo lado del acrílico hasta que se ajuste cómodamente. Si es demasiado flojo, apretar los tornillos debe cuidar de la mayor parte de él. (Aunque yo no aconsejo esto con piezas que deben con frecuencia ser eliminado o movido, un poco de pegamento también puede ayudar a apretar las zonas sueltas.)
- Tenga cuidado al manipular el acrílico! Debido a sus propiedades físicas, acrílico tiende a romperse tras el impacto, por lo que una caída de 3 pies en concreto podría inutilizar la pieza de acrílico.
- Considerar cuidadosamente el orden en que vas a insertar los tornillos. Debido a la forma de ciertas partes, haciendo algunas partes primero podría hacer más difícil que otras partes más adelante.
- Servos la mayoría vienen con los accesorios de servo, que se utilizan para montar a otras piezas. Los tornillos no caben en los cuernos servo o las piezas de acrílico que se conecta con el cuerno del servo, así que usar un taladro de tienda o un taladro de mano para hacer los agujeros más grandes.
- Antes de colocar los servos, asegúrese de que estén orientadas correctamente. Esto puede hacerse colocando los servos en sus posiciones de máxima y mínima en las articulaciones respectivas.
- Aunque este proyecto fue planeado cuidadosamente, casi le garantiza tener "dificultades imprevistas". Debido a esto, es una buena idea tener una variedad de herramientas de la tienda junto con la impresora 3D en caso de que necesite improvisar.




")

")






