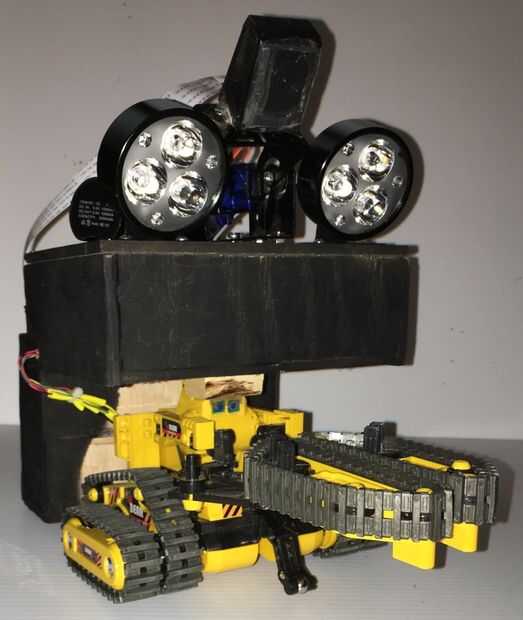
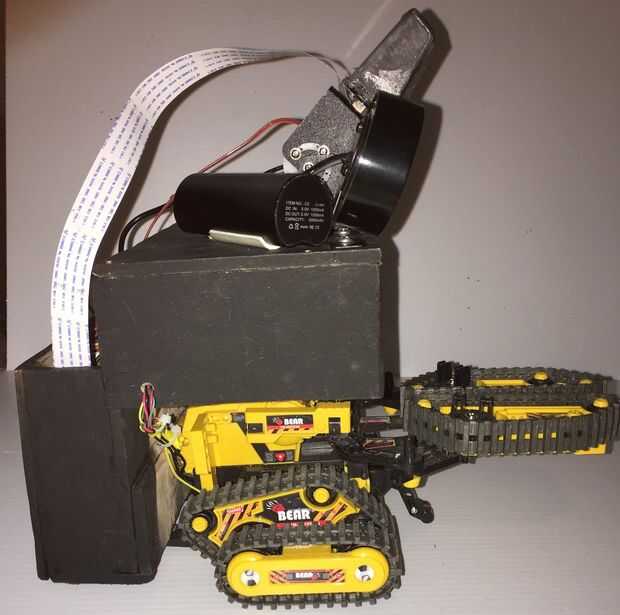


En este proyecto estoy construyendo un modelo conceptual de la disposición de bomba Robot. Pensé que la idea de construir un robot que se puede enviar en una habitación totalmente oscura para recuperar un elemento como un artefacto explosivo y llevarlo a otro lugar sería un buen desafío. Este robot será controlado por un joystick. El robot tendrá luces y una cámara de video por lo que el operador puede controlar con la palanca de mando mirando una pantalla de la computadora en un lugar totalmente diferente. Este proyecto es sólo una demostración de la capacidad y no pretende recuperar cualquier ordenanza vivo.
Este proyecto utilizará la tecnología siguiente
1. Bluetooth - el robot es controlado inalámbricamente con Bluetooth.
2. Wi-Fi - se emite la señal de vídeo mediante la conexión Wi-Fi
3. control - con la combinación del mando y nunchuck con que tenemos entradas de control de movimiento, joystick, botones direccionales y numerosos botones para trabajar. Usaremos el Raspberry Pi para el control de este robot. Se programar con lenguaje de programación Python utilizando el CWiiD library y la biblioteca de bluetooth para el controlador de Wii.
4. PWM - modulación de anchura de pulso se utiliza para controlar las velocidades del motor y controlar el servo de la cámara.
5. impulsión del Motor controlador tablero módulo L298N doble puente H - usado para controlar el robot de los motores
6. robot de Kit de la robusteza de RC - ATR - OWI-536 todo terreno 3 en 1 para las capacidades de la pista y mecanismo de grabber









")



