Paso 3: Extra Pins para los sensores de medida
Una de las características de la tarjeta de conductor que viene con el Kit robótica hacen: es es que hay extras pines de Arduino en el tablero de conductor que no se utilizan.
Estos pines puerto extra pueden utilizarse entonces para mejorar el robot con las características de su propio diseño.
Para aquellos no están familiarizados con el diseño de Arduino.
Una placa que se enchufa en el Arduino se llama un escudo. La familia de Arduino de tableros de microcontrolador tiene filas de mujeres encabezados por el tablero. Estos pernos de encabezado se usan para interfaz de sensores y otros dispositivos externos que pueden utilizarse para comunicarse con el mundo exterior.
Un escudo de Arduino tiene pins macho encabezado en la parte inferior de la placa, que se ajuste directamente en la cabecera de la mujer de los pernos en el Arduino. En el caso de la tarjeta de conductor que viene con el Kit robótica hacen: es, no todos los pines del puerto se utilizan.
Así que si queremos agregar algunos nuevos sensores o dispositivos externos, como comunicaciones Wifi a tu robot, los pines de puerto adicionales están disponibles para hacerlo. Estos pernos adicionales no están documentados en cualquier lugar excepto en el esquema. Así que este post de blog mostrará la imagen del tablero de conductor y la imagen esquemática y mapa estos pines de puerto disponible para todo el mundo ver donde están en la tarjeta de conductor.
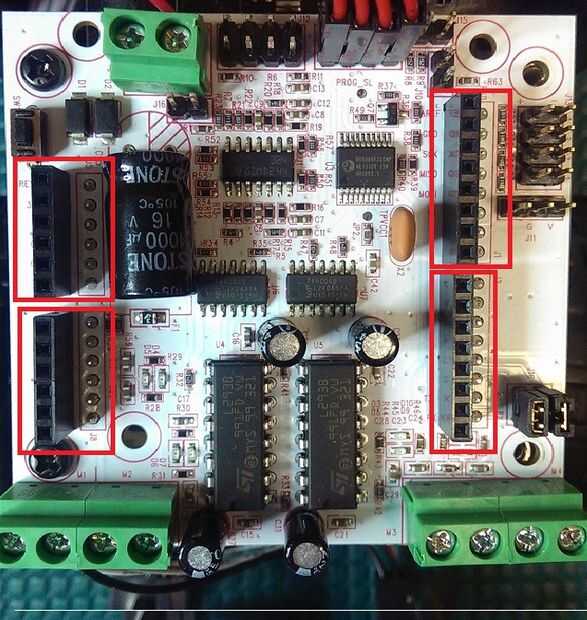
Por encima de la imagen con las clavijas del puerto marcada en rojo en el tablero de conductor y una imagen de los mismo pasadores de cabecera desde el esquema:
Un método que es común en tableros del circuito impreso (PCB) es para las conexiones de la etiqueta.
Si nos fijamos en el esquema y estrechamente en la tarjeta de conductor se pueden ver algunas de estas etiquetas. Nota que algunas de las etiquetas están cubiertos para arriba por las tomas de pin header hembra negro real puerto. Sólo tienes que hacer una suposición inteligente mediante la comparación de estos puertos con otros pins donde las etiquetas son realmente visibles.
Observe en la imagen del tablero de conductor, los pernos de encabezado izquierdo superior, marcada en rojo, si te fijas bien puedes ver los pins macho soldados que se encuentran en la parte inferior de la tarjeta de conductor. Estos pernos también aparecen en el esquema. Aviso que estos pines están conectados a las tomas de la mujer encabezado en el esquema por una línea negra.
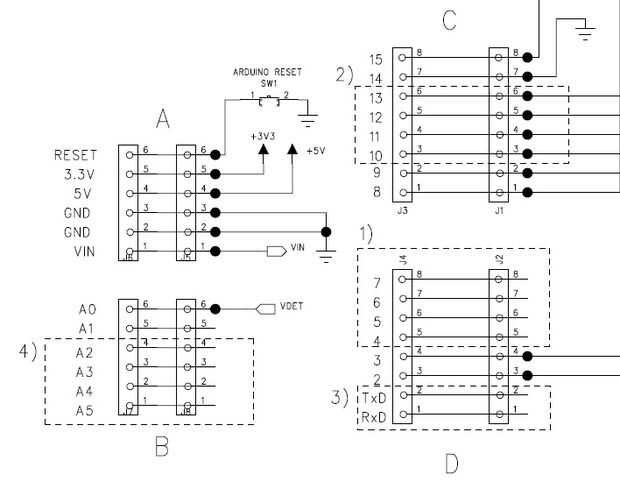
En el esquema de los conectores de pin femenino encabezado están etiquetados A, B, C y D. No debe tener ningún problema en la adecuación de estos casquillos de perno encabezado, en el tablero de conductor a los que se muestran en el esquema. Recuerda que en el anterior post del blog, "hacer: es robótica Starter Kit-Software parte 2 utilizamos los pines 4 y 5 para que podamos enviar nuestros datos del sensor a nuestro software de puerto serie y luego en nuestro ordenador.
Mirando el esquema pude determinar que pines 4 y 5 pines extras no utilizados por la tarjeta de conductor. Observe que en la sección A en el esquema que todos los pines, margen izquierda superior, se utilizan, por lo que no hay pins extras que podemos usar en esta sección para pins del puerto de datos, pero los pines marcan 3.3 V, 5 V y GND puede usarse para alimentar los sensores o dispositivos que nos vamos a conectar a las patas de puerto disponible en la sección B y D. Si nos fijamos en la sección B, podemos ver pin que a0 está siendo utilizado. Los pernos A pines analógicos, todos los otros pines de Arduino son pines digitales. En Google la diferencia si usted necesita un entendimiento.
Esto significa que no se utilizan pernos A1 – A5 y podríamos usar estos pines analógicos para nuestras propias modificaciones a nuestro robot. También ver sección C. aviso que todos los pines de puerto se utilizan en la sección C. Así que no podemos usar estos pines de puerto para nuestro propio uso. Mira ahora en la sección D, aviso que Puerto pins 2 y 3 se utilizan, de hecho los pines del puerto 2 y 3 se utilizan para la comunicación entre el procesador en la tarjeta de conductor para el Arduino. El resto de los pines del puerto 4 – 7 están disponibles para uso a uso.
Observando el esquema, pines de puerto 1 y 2 parecen no ser utilizado en la tarjeta de conductor. Recuerde que la tarjeta de conductor es un escudo y se enchufa directamente en el Arduino. En el Arduino los pines 1 y 2 se utilizan para comunicarse con el mundo exterior usando el puerto serial del hardware. Así que normalmente no queremos utilizar los pines de puerto 1 y 2 en el tablero del conductor.
Más por venir.













