Paso 2: El cerebro
Fijibot incluye cuatro servos: un servo continuo para cada rueda trasera, un servo estándar que gire su cabeza (el sensor Ping) y otro servo estándar para mover el eje delantero izquierda o derecha para dar vuelta.
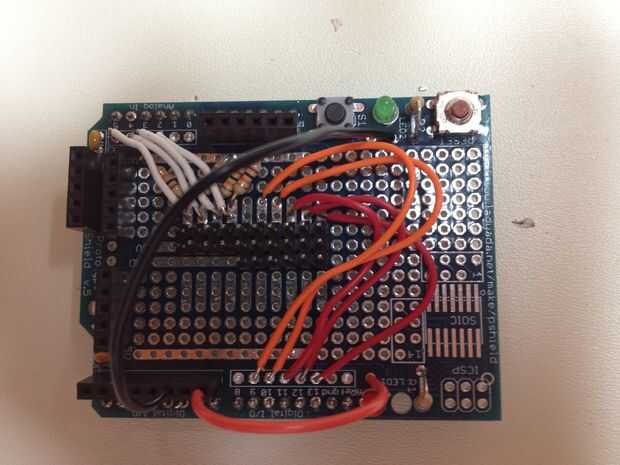
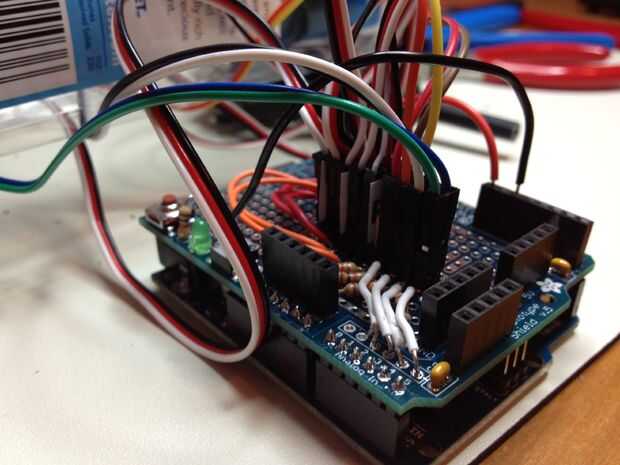
Considerando trabajar en el apretado espacio de la botella de agua Fiji, decidí que quería ser capaz de fácilmente conectar y desconectar todo (sensores, servos, etc.) de la placa Arduino. Por lo que he comprado un escudo de Proto, pernos breakaway masculinos y 6" hembra/hembra puente los cables de Adafruit. ¡ Soldar los pernos en el escudo de proto y todo lo conectado con puentes!
La sección central de la Junta de proto tiene dos rieles paralelos conectados a + 5V y GND. A la derecha e izquierda de estos carriles son almohadillas perpendiculares de 3 terminales. Tomé ventaja de este arreglo de montaje 5 pernos breakaway (3 terminales) a través de los dos carriles y las almohadillas perpendiculares. Esto básicamente me dio poder, tierra y señal alfileres para cada servo y el sensor Ping. Luego, agregué 4 pines breakaway (terminal 2) para la + 5V y la señal de almohadillas para los fotorresistores plug-in.
Nota: en la foto del anuncio que no soldadura las cabeceras de pin (que viene con el kit de proto) a los pines analógicos o el segundo banco de pines digitales. Estos dejé hacia fuera así que podría soldar los cables directamente a los cojines.
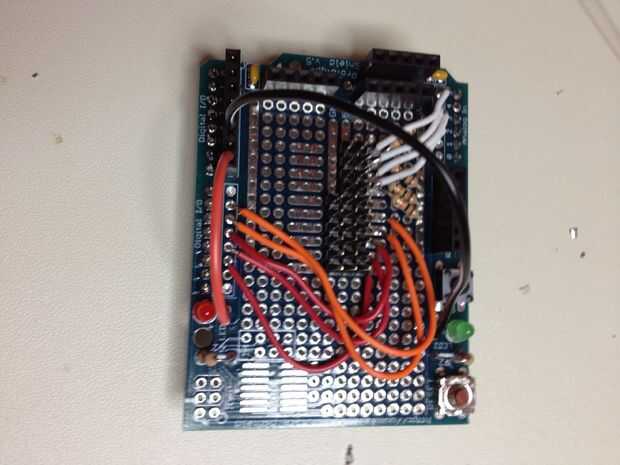
Conecté los cables a los pines PWM digitales (para los servos) y a los pines analógicos (para los fotorresistores). También he añadido una resistencia de 10K a tierra para cada fotorresistencia.
Conecté los cables desde pines 7 y 9 de la Junta de proto a los terminales positivos de los LEDs verdes y rojos respectivamente.
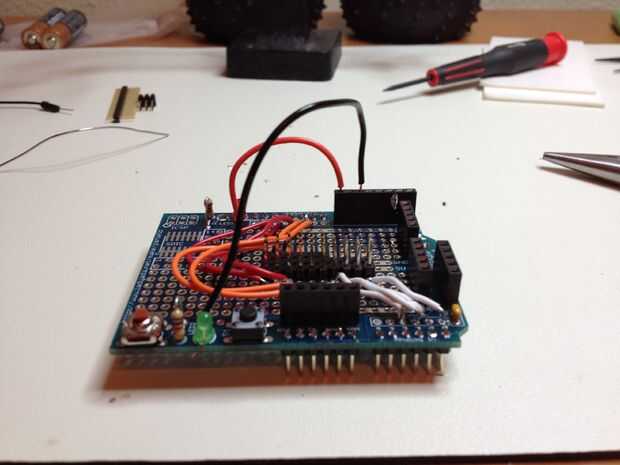
Para poder ejecutar los cuatro servos y Arduino, utilicé dos fuentes de alimentación separadas. El Arduio funciona con una batería de 9v conectada a Vin. Cuatro servos y el sensor Ping ejecutar en un paquete de baterías 4-AA, que está conectado en paralelo con un panel solar de 6 v para la carga en el circuito. Desde el panel solar y batería están muy igualados, sólo conectado un diodo entre ellos para evitar que la corriente.
Me encontré dos fuentes de alimentación a través de un interruptor DPST así puedo poder él completamente, pero dejar el panel solar conectado a la batería de 4-AA. De esta manera él puede cargar sus baterías aunque no esté en uso.