Paso 4: El chasis
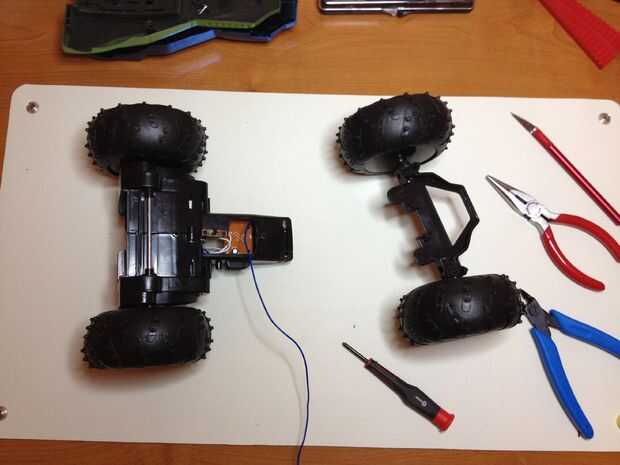





Decidí usar las ruedas traseras por el poder y las ruedas delanteras y suspensión para stearing. Os adjunto dos servos continuadas en la parte posterior de la botella de agua con cinta de doble cara. También usé cinta de doble cara para fijar los servos entre sí. Luego corté una pequeña ranura en la botella de plástico para alimentar en los cables de servo.
Para el front-end, os adjunto un servo estándar para el sistema de suspensión que podría girar a las ruedas delanteras izquierda o derecha. Luego corte un agujero rectangular en la botella de agua y cuatro agujeros perforados. A continuación, se deslizó el servo en la abertura y había montado en la Asamblea a la botella mediante 6/32 tuercas y tornillos.
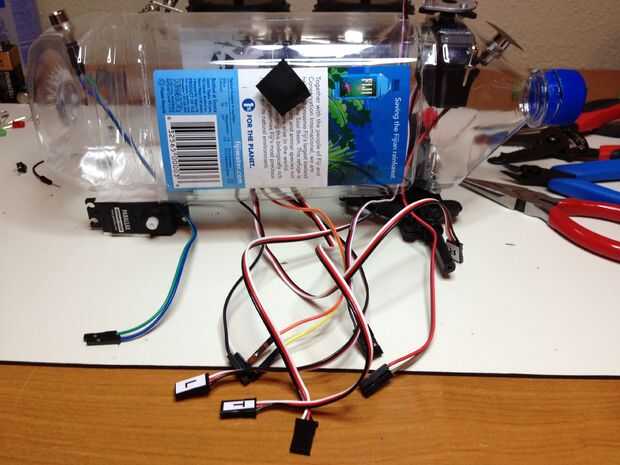
Cortar un colgajo en el lado de la contraetiqueta de la botella que me permiten trabajar dentro. Yo estaba preocupado reduciría la estabilidad de la botella, pero sigue siendo realmente muy robusta. Usé una tira de Velcro para sellar la tapa. Luego, perforar cuatro agujeros de 5/16" en la parte frontal, posterior y dos lados de la botella de agua y había montado en los soportes de LED.
Cabeza de Fijibot es un sensor ultrasónico Ping montado en la parte superior de un servo estándar. Perforado un agujero en la parte superior de la botella para servos engranajes para reunirse con el soporte de Ping y luego cuatro agujeros para los pernos de 6/32" garantizar el servo a la botella.
Finalmente, me encontré con todos los cables de la aleta y les etiquetado por consiguiente para la conexión a la placa de circuito.