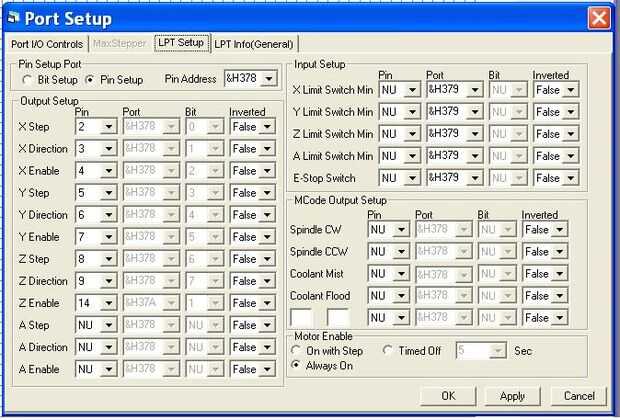
Así que es momento para conducir los motores. Y aquí he puesto juntos un circuito que creo que es la manera más fácil y más barata absoluta para controlar motores paso a paso con señales de paso y dirección. Trabaja con muchos de los softwares gratis o de bajo costos que producen el paso y dirección de las señales a través del puerto de impresora paralelo. Voy a explicar cómo funciona, pero para aquellos de ustedes que solo quieren subirse con él... The_Next_Step
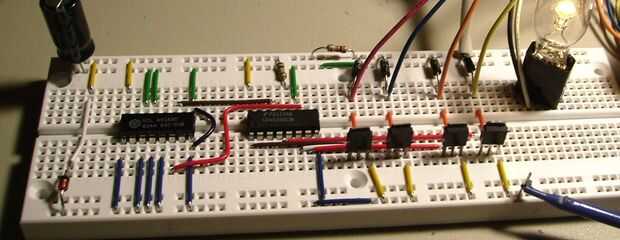
Pero yo sugeriría para aquellos de ustedes que no están familiarizados con los circuitos para hacer en un tablero de pan (ver fotos). De esta forma usted puede fácilmente corregir cualquier error y probar cosas diferentes.
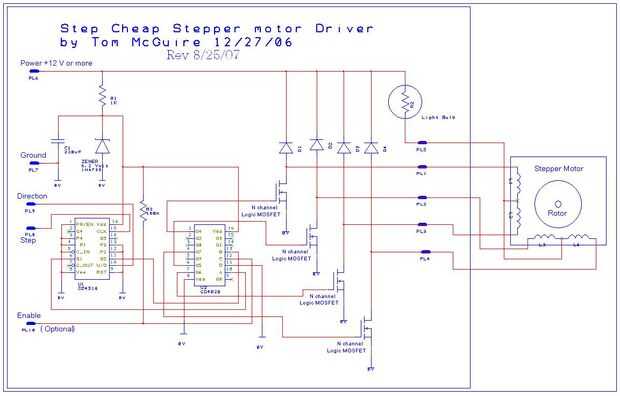
Este esquema es sólo para controlar un motor por lo de la máquina de molienda que necesita 3 de estos circuitos y 3 motores.
De izquierda a derecha y arriba a abajo. Intento dibujar esquemas que voltajes positivos hacia la parte superior y volge tierra o negativo es hacia abajo. Entradas están a la izquierda y las salidas a la derecha. Puño el voltaje que vas a utilizar para ejecutar que el motor necesita ser caminó y regulado para las virutas de la lógica. Usé un 6,2 voltios Zener para hacerlo porque es lo suficientemente bajo como para los chips de lógica recibir las señales desde el puerto de impresora y lo suficientemente alto como para las salidas a muchos de los FETs de potencia estándar, por lo que no tendrá que utilizar lógica FETs como se muestra en el esquema. El resistor R1 disminuye el voltaje, el diodo Zener regula a 6,2 voltios y el condensador que C1 filtra cualquier ruido del motor, y esta tensión alimenta el dos IC.
El primer IC (CD4516) se llama un contador arriba/abajo. Una señal desde el puerto de la impresora dirá el contador si se cuenta hacia arriba o hacia abajo y la otra señal, llamada paso, incrementar o disminuir el contador por uno cuenta. Ahora eran sólo se van a utilizar dos salidas desde el contador Q1 y Q2. Con este método de conteo de binario solo hay 4 combinaciones de salida en el mostrador: 00, 01, 10 y 11. Estas líneas se alimentan a las entradas A y B del otro IC (CD4028) que decodifica estas combinaciones para 4 salidas de seprate.
Hice un truco aquí usando la C de entrada como una entrada de Enable. Si el Enable(optional) está conectado al puerto paralelo y la computadora le dice para apagar todas las salidas a los FETs irá low(Off). Así que las cuatro salidas del decodificador conducen los transistores FET y los FETs conducen los cuatro polos del motor.
Ahora todo el mundo quiere saber lo que es la bombilla. No tanto si se utiliza un bulbo o una resistencia, la que un foco viene con un zócalo. Puede obtener estas bombillas base de cuña de 1 watt a 20 vatios. Comienzo con puede ser un foco de 4 vatios y si encuentra que necesita un poco más de carne sólo sacarlo y poner una bombilla de 10 vatios. Es muy útil. Y es bueno tener alguna caída de tensión hay como especie de un lastre para los devanados del motor. Los diodos de captura de la corriente que sale del motor cada vez que apaga los transistores FET. El diodo alimenta esta actual regreso a la fuente.
Cuando te levantas el circuito y corriente encontrar una fuente de alimentación pone más tensión que usted realmente necesita y luego cambia a bombillas de luz hasta que te lo dan sin problemas. Algunos de mis motores son 5 o 6 voltios y algunos son de 12 voltios pero todo funciona.













