Paso 4: Funcionamiento del módulo de medición ultrasonido HC-SR04.
Los circuitos auxiliares fabricados en el módulo lo hace casi
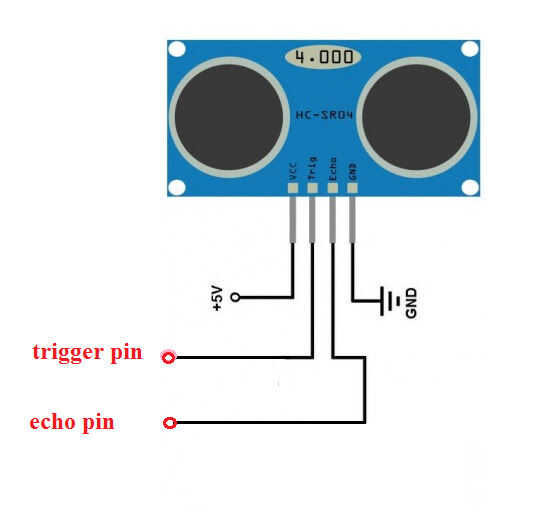
soporte solo y lo que el programador tiene que hacer es enviar una señal de disparo a él para iniciar la transmisión y se recibe la señal de Eco para el cálculo de la distancia. HR-SR04 tiene cuatro pines: Vcc, Trigger, eco, GND y se explican en detalle a continuación.
1) VCC: tensión de alimentación de 5V DC es conectado a este pin.
2) gatillo: la señal de disparo para iniciar la transmisión se da a esta clavija. La señal de disparo debe ser un pulso de 10uS hora. Cuando el módulo recibe una señal de disparo válido emite 8 pulsos de ultrasonidos de 40KHz desde el transmisor. El eco de este sonido es recogido por el receptor.
3) Echo: en este pin, el módulo de salidas de forma de onda con tiempo proporcional a la distancia.
4) tierra: tierra está conectada a este pin.
el tren de pulsos de 40KHz se transmite justo después del pulso de disparo de 10uS, y la salida de echo se obtiene después de algún tiempo más. El siguiente pulso de disparo puede ser dado solamente después de que el eco es descolorado lejos y este tiempo período es llamado ciclo. El período de ciclo de HC-SR04 no debe debajo de 50mS. Según hoja de datos, se puede calcular la distancia de la anchura de pulso de eco utilizando las siguientes ecuaciones.
Distancia en cm = ancho de pulso de eco en nosotros / 58
Distancia en pulgadas = anchura de pulso de eco en nosotros / 148













