Paso 1:

Un controlador proporcional – integral – derivado (regulador de PID) es un mecanismo de retroalimentación de la bucle de control (controlador) de uso general en sistemas de control industrial. Un PIDcontroller continuamente calcula un valor de error como la diferencia entre una variable de proceso medido y un valor de consigna deseado.
El controlador intenta minimizar el error en el tiempo por el ajuste de una variable de control, tales como la posición de una válvula de control, un regulador o la energía suministrada a un elemento de calefacción, en un nuevo valor determinado por una suma ponderada:
EQ se muestra obve.
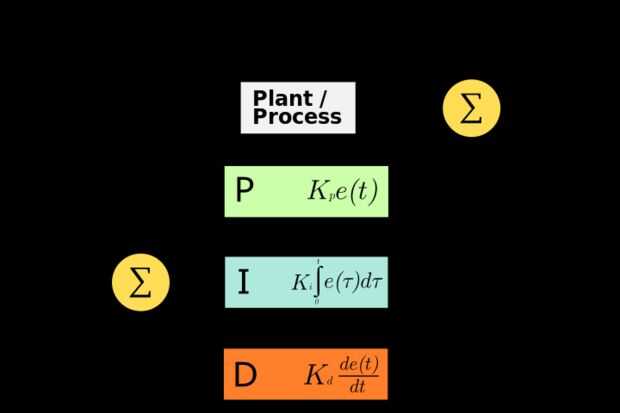
donde Kp, Ki y Kd, todos no negativos, denotan los coeficientes para la proporcional, integral y derivado, en términos respectivamente (a veces denota P, I y D). En este modelo,
P representa el valor actual del error (por ejemplo, si el error es grande y positiva, la variable de control sea grande y negativa), representa valores pasados del error (por ejemplo, si la salida no es suficiente para reducir el tamaño del error, la variable de control se acumula con el tiempo, causando el regulador aplicar una acción más fuerte) , andD representa posibles valores futuros del error, basado en su actual tasa de cambio
Como un controlador PID se basa sólo en la variable de proceso medida, no en el conocimiento del proceso subyacente, es ampliamente aplicable. Templando los tres parámetros del modelo, un controlador PID puede ocuparse de requisitos de proceso específicos. La respuesta del controlador puede ser descrita en términos de su capacidad de respuesta a un error, el grado en que el sistema sobrepasa un valor deseado y el grado de cualquier oscilación del sistema. El uso del algoritmo de PID no garantiza control óptimo del sistema o incluso itsstability.
Algunas aplicaciones pueden requerir utilizando sólo uno o dos términos para proporcionar el control apropiado del sistema. Esto se logra mediante el establecimiento de los otros parámetros a cero. Un controlador PID será llamado un PI, PD, P o regulador en la ausencia de las acciones de control respectivas. Los controladores PI son bastante comunes, puesto que la acción derivativa es sensible al ruido de medición, mientras que la ausencia de un término integral puede evitar que el sistema llegue a su valor objetivo.



")
")



")




