Paso 3: Configuración de PC
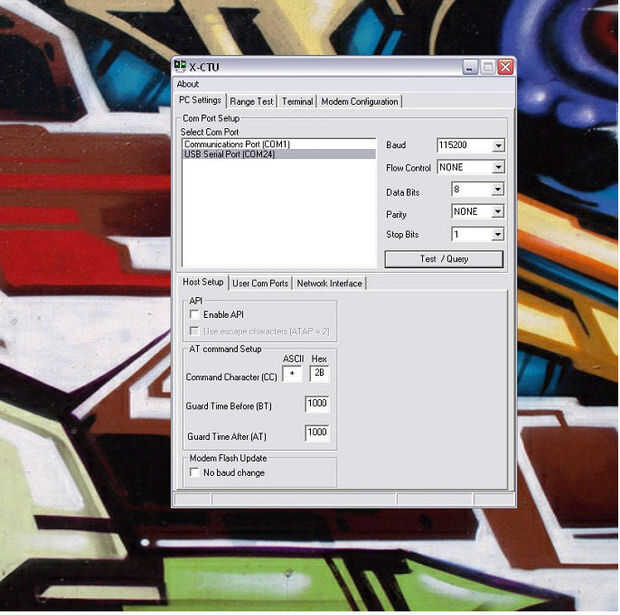
También es un gran lugar para comprobar la configuración de la velocidad en baudios. Si han cambiado la configuración y no está seguro de que xbee tiene que ajuste, puede comprobarlo aquí.
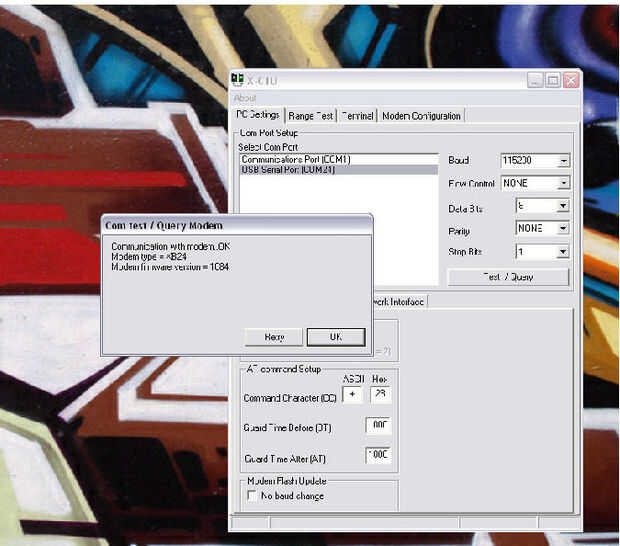
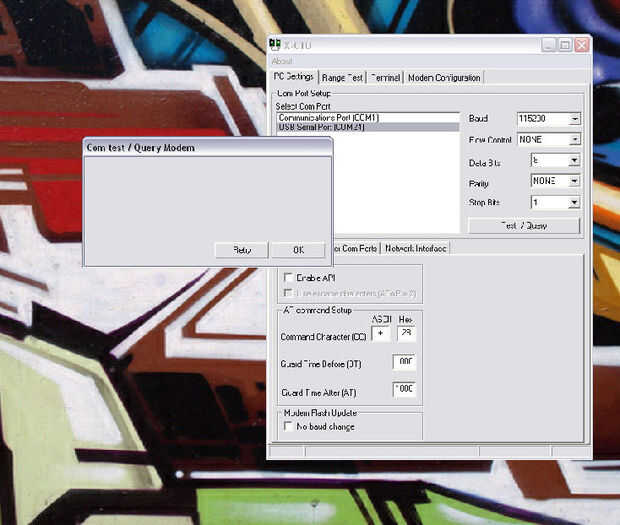
Para empezar, sólo hablemos de un Xbee nuevo. Más que probable que tu Xbee conserva los ajustes de fábrica si tu leyendo esto. Por lo que se debe establecer a 9600 baudios. Sin control de flujo. Bits de datos 8. Sin paridad. Con 1 bit de parada. Si nos fijamos en el lado derecho de la ventana XCTU, debería ver esto como configuración estándar. Haga clic en el botón de prueba o consulta. Si aparece una ventana que dice algo de información sobre tu Xbee, el conjunto de la prueba. Si no, algunas cosas mal.
Si apareció con un error en la configuración de la PC, verifique su configuración antigua. Si eso no funciona, verifique la nueva configuración. También puedes probar con las instrucciones para unbrick un xbee en el instructable. Si esto aún no ocurre nada, recuerde exactamente lo que hiciste y en contacto con soporte técnico de Digi. Ellos deben ser capaces de ayudarte.











")

