Paso 3: caminar!!!!!!
Plano frontal
Para lograr un caminar correcto, primero se centran en el plano frontal.
Podría ser muy simple,
T es un tiempo variable entre cada lazo,
KML es la amplitud del movimiento de rodillo del tobillo (entre 5 y 15 °), depende de la ubicación del centro de masa de su robot y pies con.
FD y FG son la posición cero del rollo de pie.
t = t + 1;
Si (t > 100) {t = 0;}
myservo7.Write(FG-KML*sin(2*3.14*t/100)); pie izquierdo
myservo8.Write(FD+KML*sin(2*3.14*t/100)); pie derecho
retardo (T);
Sí, es sólo un seno.
Ajustar T y KML para permitir que el robot para levantar los pies del suelo.
Si KML es a la baja lo no será posible, si es alta, él caerá.
Plano sagital
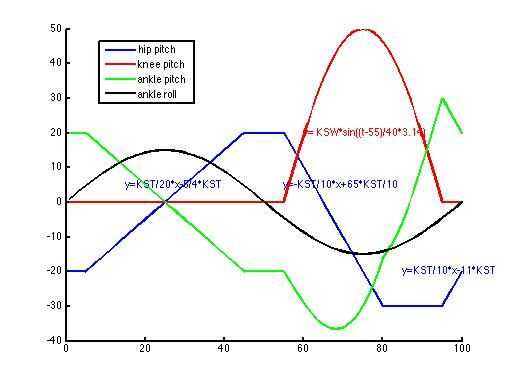
En la foto, se puede ver la posición de las articulaciones según el ciclo de la marcha.
La idea básica es almacenar la posición de las articulaciones en las tablas.
dos parámetros se utilizan para definir la amplitud del movimiento.
KST se utiliza para la cadera
y KSW para la rodilla durante el swing.
El movimiento de la articulación son simplemente escrito usando la función lineal según el % del ciclo de marcha.
void setkin (int [] FHD, FKD de int [], int FHG [], int FKG [], int KST, int KSW)
{
para (int i = 0; i < = 5; i ++) {}
FHD [i] =-KST; Flexión de cadera derecha
FKD [i] = 0; Flexión de la rodilla derecha}
para (int i = 6; i < = 45; i ++) {}
FHD[i]=KST*i/20.0-5*KST/4.0;
FKD [i] = 0; } //
para (int i = 46; i < = 55; i ++) {}
FHD [i] = KST;
FKD [i] = 0; } //
para (int i = 56; i < = 80; i ++) {}
FHD[i]=-KST*i/10.0+65*KST/10.0;
FKD[i]=KSW*sin((i-55)/40.0*3.14); } //
para (int i = 81; i < = 95; i ++) {}
FHD [i] =-3 * KST/2.0;
FKD[i]=KSW*sin((i-55)/40.0*3.14); } // //
para (int i = 95; i < = 100; i ++) {}
FHD [i] = KST * 10.0/i-11 * KST;
FKD [i] = 0; } //
La segunda parte se obtiene con un simetry de tiempo
para (int i = 0; i < = 49; i ++) {}
FHG [i] = FHD [50 + i]; Flexión de cadera izquierda
FKG [i] = FKD [50 + i]; Flexión de la rodilla izquierda}
para (int i = 50; i < = 100; i ++) {}
FHG [i] = FHD [i-50];
FKG [i] = FKD [i-50]; } }
Tobillos:
Si lees sólo el cuadro, el tobillo =-cadera-rodilla
Esto permite mantener el pie paralelo al suelo en el plano sagital.

 y LabVIEW")











