Paso 6: El microcontrolador PICAXE
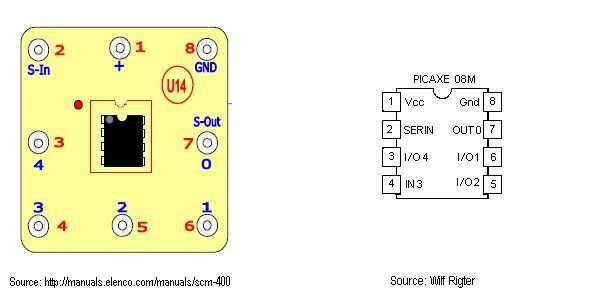
El bloque de circuitos de Snap (U14) que sirve como el portador PICAXE es especialmente marcado más fácilmente identificar los pines en el chip del microcontrolador PICAXE. Pensar en el chip como un error cuadrado con ocho patas. Hay una muesca en la parte superior para ayudar a orientar el chip y un pequeño punto marcas pierna 1. Las piernas y los pernos pueden a veces confundirse, pero en el bloque de U14 las piernas (y los broches correspondientes conectadas a las patas) están marcados en rojo 1-8 va en sentido antihorario. Las funciones de cada pierna están marcadas en azul.
Pierna 1 (complemento 1): este es el positivo (+) entrada de tensión. Puede tomar de 3 voltios a 5 voltios. Tienes que evitar poner más de 5 voltios a través de lo PICAXE ya que esto podría dañarlo.
Pata 2 (complemento 2): S-in Serial en el pin, se utiliza para descargar el programa para el PICAXE.
Pierna 3 (broche de presión 3): este pin 4! Por suerte los broches están etiquetados o los números podrían confundirse. Pin 4 puede ser utilizado como un pin de entrada o una salida. En el paso anterior este es el pin del programa establecido en alto para enviar corriente al motor durante diez segundos. luego el programa ajuste el perno baja para cortar el poder de detener el motor de giro.
Pata 4 (snap 4): este es el pin 3. Es un pin único de entrada
Pata 5 (snap 5): este es el pin 2. Puede ser utilizado como un pin de entrada o una salida
Pata 6 (snap 6): este es el pin 1. Puede ser utilizado como un pin de entrada o una salida
Etapa 7 (snap 7): este es el pin 0. Es un pin de salida única. También está la clavija de salida Serial. Este pin también se utilizarán cuando se descarga el programa para el PICAXE.
Pata 8 (snap 8): esto es GND o negativo (-) para el PICAXE











")

