Paso 5: Un programa de muestra para el PICAXE
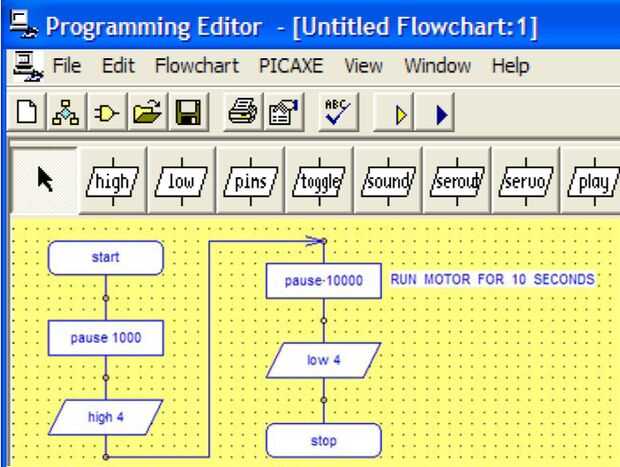
El terminator de "start" es ignorado por el compilador, pero es útil para localizar fácilmente el comienzo de su programa.
El proceso de "pausa" dice el PICAXE que esperar 1000 milisegundos o 1 segundo antes de proceder al siguiente paso en el programa. Cuando dices el PICAXE para ejecutar el programa, usted notará un 1 segundo pausa antes de que algo suceda.
El símbolo de diagrama de flujo del paralelogramo representa datos, o entrada/salida. Contiene el comando "alto 4" y este comando pondrá pin 4 alta, que significa que el microcontrolador envía tensión a ese pin o de salida a eso perno. Si tienes un motor conectado al pin 4 y corriente de este pin pasará a través del motor y el motor comenzará a girar.
Este proceso de "pausa" dice el PICAXE 10000 milisegundos o 10 segundos. Esto significa pin 4 seguirá siendo alta durante 10 segundos, continuando así enviar corriente al motor durante diez segundos (el motor girará durante diez segundos).
Este símbolo de diagrama de flujo de datos contiene el comando «baja 4.» Dice el PICAXE para desactivar el pin, o a la salida de 0 voltios. Esto cortará energía con el conector y el motor conectado a él dejará de girar.
Si quieres ver como luce el código básico, puede haga clic en diagrama de flujo y haga clic en convertir organigrama a BASIC. El código se verá como la siguiente:
' BASIC convertido de diagrama de flujo:
' C:\DOCUMENTS AND SETTINGS\DESKTOP\SNAPROVERBOT. CAD
' Convertido en 30/10/2011 en 20:53:11
principal:
PAUSE 1000 ' dice el PICAXE que esperar 1000 milisegundos (1 segundo)
alto 4 ' conjuntos de perno 4 alta, que envía corriente al pin 4 (si hay un motor conectado hacer girar)
PAUSE 10000 ' dice el PICAXE que esperar 10000 milisegundos (10 segundos, el motor girará durante 10 segundos)
baja 4 ' establece pin 4 bajo, o salidas de 0 voltios. Esto interrumpe la alimentación con el conector y el motor deje de girar











")

