Paso 3: Sección electrónica:
Utilizamos el motor en marcha en un coche de motor síncrono con su propia biblioteca. De esta manera, también sucede ser que minimizar los errores en el trabajo del motor con sistema completo de datos.
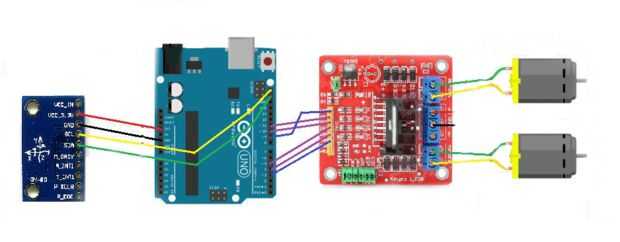
Estamos poniendo el lado positivo de la batería para el motor de entrada de alimentación de 12V LiPo en el disco. Estamos poniendo al final menos de la tierra de entrada.
Además el atributo de circuito a 0.1 unidades 3 potenciómetro analógico año y 2 pins. Aquí la tarea de potenciómetro kPa, ajuste manualmente los valores de kd y nos permiten encontrar el punto de equilibrio óptimo del robot. Deje que Mpu6050 sensor de giroscopio montado horizontalmente en la placa inferior.









")



