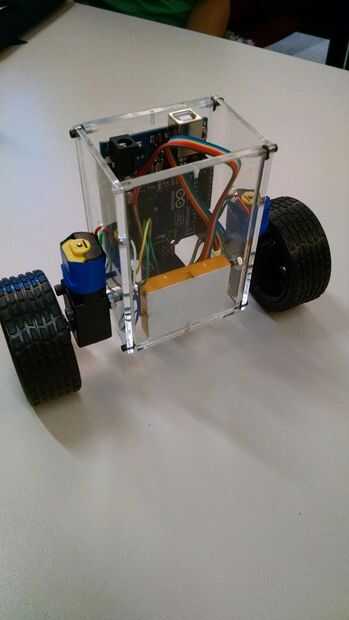
Este detalla el proyecto final para el curso de Mecatrónica en la Universidad de Rowan. Para este proyecto, un robot fue diseñado y construido para usar una placa Arduino, motores y un acelerómetro para posición vertical de equilibrio sobre dos ruedas. Para lograr esto, el cuerpo del robot fue diseñado en Solidworks y corte de acrílico usando un cortador láser. Entonces fue montado el robot, y código de Arduino fue desarrollada para leer la señal de entrada de acelerómetro y salida de una señal a los motores. Valores de este código fueron ajustados para lograr un fino grado de control sobre el comportamiento del equilibrio del robot. Un esquema de control On-Off se utiliza para codificar el robot. Idealmente, un giroscopio habría sido utilizado para obtener datos más precisos de la posición, pero debido a retrasos de orden de compra y las limitaciones de tiempo, se utilizó un acelerómetro en su lugar. Una lista de piezas utilizadas en este proyecto puede encontrarse en la siguiente sección de materiales.


 Básicos Arduino Robot buscador de luz!")









