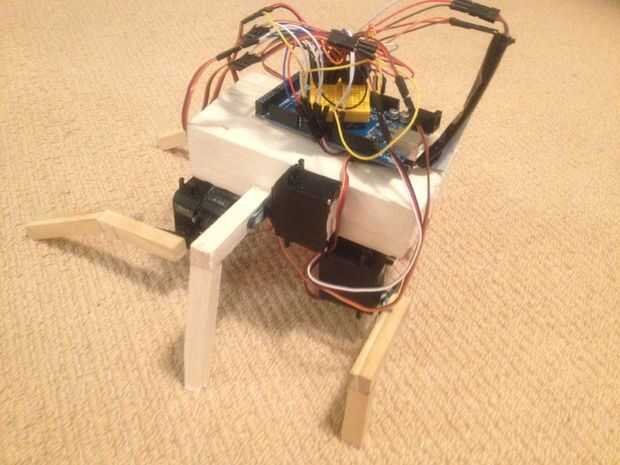
Rana (rana en Italiano) es un robot inspirado biológico. Es el resultado de meses de investigación y desarrollo. Uno de los principios aplicados proviene de otra insuperable hice llamada "arduino robot bípedo". Este robot utiliza los métodos combinados caminar de una hormiga y una rana. Esto garantiza que el robot pasos y camina más realista que la mayoría de hexápodos. Esta forma de locomoción no se ha utilizado nunca antes y es totalmente original. Fue desarrollado por Stephane Hatgis-Kessell. Tenga en cuenta que este robot fue construido solamente para fines de investigación pero sus directores se utilizará en otros futuros robots.

 Básicos Arduino Robot buscador de luz!")

 también controlado por voz")








