Paso 4: "Hola mundo" PICAXE
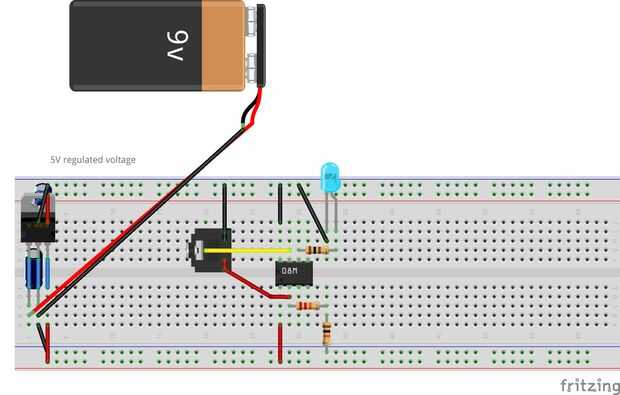
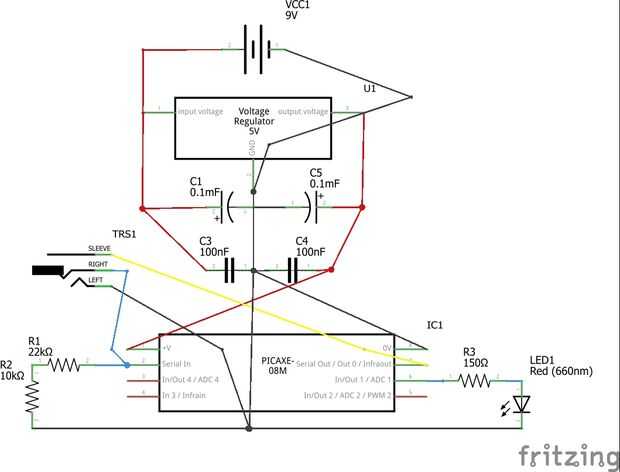
Configurarlo según los diagramas anteriores (nota la tierra y tensión en los pernos... son exactamente lo contrario del Temporizador 555 así que ten cuidado!).
(Soldado los cables de puente a la toma y altamente sugiero que hacerlo, demasiado)
A parpadear un LED en un segundo, lo apague por un segundo y encenderla otra vez en un bucle.
El código es relativamente autoexplicativo:
CÓDIGO "HOLA MUNDO"
_____________________________________________________________________________________________________
| principal:
| 1 alta
| PAUSE 1000
| baja 1
| PAUSE 1000
| Goto principal
|____________________________________________________________________________________________________
Sólo en caso que usted se está preguntando, el 1 de alta y baja está parado para "Pin 1 de la lógica". Echa un vistazo en el pin-out (C.0, C.1, C.2, C.3... etc., piense en ello como "pin lógica 0, el pin 1 de lógica, lógica pin 2, pin 3 de la lógica...).
Siga estas instrucciones:
1) Inserte el enchufe del USB de la AXE027 en el mismo puerto USB que usaste antes de
2) iniciar el Editor de programación.
3) en el Editor de programación, vamos a la pestaña "Configuración" bajo "Explorador de espacio de trabajo".
4) Compruebe que está seleccionado el puerto COM correcto y 08 M 2 está seleccionada.
5) enchufe el equipo estéreo del enchufe en el extremo libre del cable USB en la stereo que ahora está cableado en el protoboard.
6) Compruebe el cableado y luego conecte el suministro de energía a la placa.
7) haga clic en el botón etiquetado como "programa" en la ventana del Editor de programación para subir la chip.*
8) una vez hecho, retire el AXE027 cable y retire al estéreo todo. NO QUITE LOS RESISTORES!!!!!!
* Observe el botón de "Sintaxis". Comprueba los errores de código. La pestaña de "Simular" en la parte superior de la pantalla abre una ventana que permite simular lo que sucede en la viruta. "Programa" lo carga en el chip.
SI NO FUNCIONA...
Desconecte el enchufe del cable USB de la placa PICAXE, dejando el otro extremo del cable conectado al ordenador. Establece su mulitmeter en voltios DC y fije sus puntas de prueba a las parte inferior dos "secciones" de la misma serie. Haga clic en el botón de programa una vez más, y su medidor debe mostrar 5 voltios brevemente saliendo de su computadora al enchufe en el extremo del cable. Si puedes detectar el voltaje, entonces el software se instala y funciona correctamente. Esto significa que usted tiene un problema en el protoboard. Recuerde, no se olvide de las resistencias de 10k y 22 k. Son absolutamente necesarias para el chip funcione durante o no durante la programación. NO LES OLVIDÓ!!!!!!
Si no detecta ningún voltaje, entonces el software probablemente no fue instalado correctamente, o busca el puerto serial incorrecto. Asegúrese de que el puerto COM AXE027 destaca! Si lo está, intente desinstalar y reinstalar el software.

")




")






