Paso 1: Conociendo los componentes


En este paso doy información importante sobre los componentes del robot y cómo prepararlos para el montaje.
En primer lugar, el corazón del robot: un Arduino UNO R3. Aunque estoy utilizando un Arduino UNO, puede usar otras placas Arduino para montar tu robot. Decidí usar un Arduino UNO, porque es, de lejos, la placa de Arduino más popular y más personas serían capaces de reconstruir este robot. Si usted tiene un vencimiento de Arduino, también puede agregar comentarios de voz a tu robot como lo hice en este Instructable.
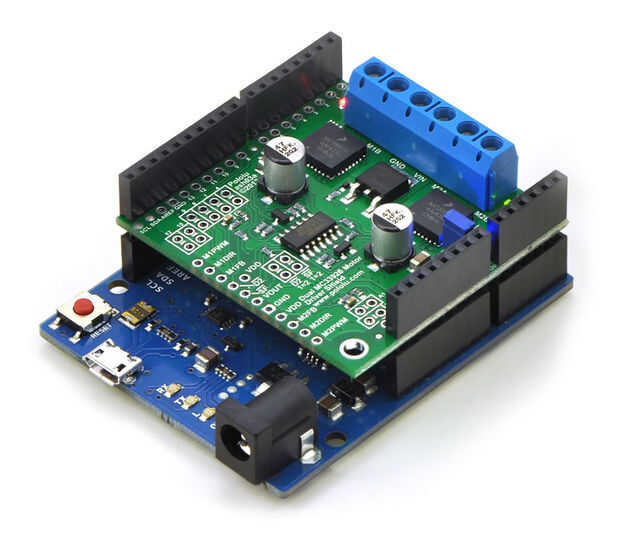
Para mover los motores de DC, usé este escudo de Pololu (foto arriba). Es un controlador de motor dual capaz en el control de 5 a 28V DC motores y entregar hasta 3A de corriente continua al motor. Aunque creo que este es un muy buen escudo, lo que me impresionó más en productos de Pololu es su documentación clara y detallada. Además, chip proporciona una biblioteca de Arduino que hace realmente sencillo controlar los motores. Sólo tienes que pasar la velocidad y dirección (valores negativos o positivos) a la función setSpeeds . Si optan por usar otro controlador de motor DC, preste atención a los pines utilizados por el controlador porque no puede entrar en conflicto con cualquier otro perno usado por el robot. El escudo de chip utiliza los siguientes pines de Arduino: digital 4, 7, 8, 9, 10 y 12; analógica 0 y 1; tierra; y 5V. Lo más importante aquí es que sólo los pines 9 y 10 se utilizan como pines PWM y el temporizador para generar pulsos en estos pines no es el mismo timer (temporizador 2 en el UNO) utilizado la clase BVSMic de BitSophia.
Para establecer comunicación con el servidor y acceder a los servicios de servidor de BitVoicer, usar el Microchip WiFi RN171VX módulo. En este módulo se destacan dos características principales: toda comunicación puede hacerse a través del puerto serial de una manera simple; y el módulo tiene el mismo factor de forma que la mayoría de los módulos XBee popular. En otras palabras, si ya tienes un XBee shield, usted probablemente no necesitará comprar el escudo de Sparkfun utilizo en este robot.
Utilizando el escudo de XBee con el módulo de WiFi Microchip hecho el robot fácil de montaje. Sin embargo, he identificado un problema en esta combinación. Se sabe que el trabajo con la radio es extremadamente complejo y considerado por algunos como "magia vudú". Bueno, me di cuenta de que y el WiFi adaptador está en transmisión de datos, se produce una fuerte interferencia en la señal de audio por el Arduino ADC. No he podido identificar con precisión la fuente de esta interferencia, pero tengo dos fuentes posibles: la actual dibuja de módulo máximo (hasta 240mA) no se se desemparejan adecuadamente y comprometer el voltaje de referencia para el ADC Arduino; o la señal emitida por la antena está siendo recogida por algunos pernos expuestos justo debajo del módulo. Por lo general, fabricantes de módulos WiFi instruir a diseñadores a evitar poner cualquier cosa (incluso planos de tierra) cerca de la antena precisamente para prevenir este tipo de problema.
Para corregir el problema descrito anteriormente, soldado un 3.3V regulador de voltaje y un 10μF capacitor electrolítico a la Sparkfun escudo por lo que podrían proporcionar el voltaje de referencia para el ADC Arduino. La misma fuente de energía se utiliza el micrófono de electret de Sparkfun. Solucionó los problemas de volumen de pico que estaba viendo en el BitVoicer Server Manager. Incluso durante los períodos de silencio, el nivel de audio fue llegar tan alto como 35 (0-100) en el Server Monitor. Si ves lo mismo que sucede en su proyecto, investigar qué está pasando con la señal de audio por el ADC Arduino.
Decidí que también iba a soldar unos LEDs que indican el estado de un servidor de BitVoicer funcionalidades utilizar el espacio de creación de prototipos en el escudo de Sparkfun. En las imágenes anteriores, puedes ver cómo soldar los componentes en el protector de Sparkfun. Los LEDs de la izquierda a la derecha expone la siguiente información:
- Indica si se ejecuta el servidor de BitVoicer o si la conexión permanece activa;
- Indica si se está ejecutando el servicio de reenvío de datos ;
- Indica si un motor de reconocimiento de discurso ha sido asignado a la Arduino;
- Indica si estamos en el periodo activado de palabra activación. Este LED se ilumina sólo cuando se identifica la palabra de activación.
Sobre el micrófono de electret específica, hay muchas opciones disponibles en el mercado: Sparkfun, Adafruit, RoboCore, Hackerstore y probablemente muchos otros. Para utilizar el código estoy publicando en este Instructable, asegúrese de que usted está comprando es lo analógico, el voltaje requerido está disponible en la placa de Arduino y la amplificación es alta suficiente (generalmente 100 x para micrófonos electret) para el ADC Arduino.
El 2WD chasis utilizado en el robot es uno de los más baratos y más popular en ebay. El kit completo contiene una plataforma de acrílico, dos ruedas de plástico/goma, 360 una º rueda, dos motores de corriente continua con el engranaje (1:48 ratio), un sostenedor de batería 4xAA, dos discos de codificador de velocidad y un juego de tornillos.








 con Arduino y Android(bluetooth)")



")
