Paso 3: Circuito y funcionamiento:
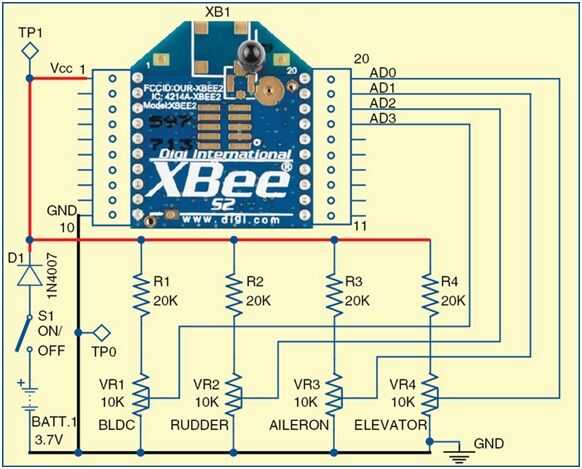
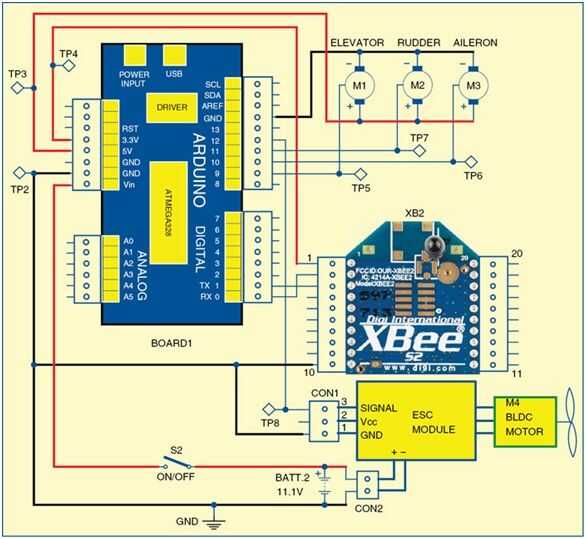
La figura 1 muestra el circuito de la sección de transmisor de aviones controlados por XBee y figura 2 se muestra la sección del receptor. Los circuitos se construyen alrededor de Arduino UNO (board1), un par de XBee (XB1 y XB2), electrónica de la velocidad (salida) módulo, tres servo motores (M1-M3) y un motor BLDC (M4).
Sección de transmisor es conducido por un 3.7V batería y receptor sección por una 11.1V batería de LiPo. 11.1V se utiliza para alimentar el motor sin cepillo de la C.C. (o motor de BLDC) a través del módulo de salida. El Arduino board1 recibe alimentación de 11.1V batería en su clavija de entrada Vin.
Los cuatro potenciómetros en la sección del transmisor se utilizan para el envío de señales de control diferentes a la sección de receptor a través de módulos de RF. Las señales de control recibidas en el receptor son procesadas por el microcontrolador de Arduino, que a su vez controla el motor BLDC y los servos para timón, alerones y el elevador del avión.
Tablero de Arduino Uno: Arduino es una plataforma de prototipado de electrónica de código abierto basada en
flexible, fácil de usar hardware y software. Está destinado a artistas, diseñadores, aficionados y cualquiera interesado en la creación de objetos interactivos o entornos.
Arduino Uno es una placa basada en el microcontrolador ATmega328. Consta de 14 pines de entrada/salida digitales, seis entradas analógicas, una conexión USB para programar el microcontrolador incorporado, conector de alimentación, un encabezado ICSP y un botón de reset. Es operado con un oscilador de cristal de 16MHz y todo lo necesario para apoyar el microcontrolador contiene. Es muy fácil de usar como el usuario se debe conectar a un ordenador con un cable USB o energía con un adaptador AC a DC o batería para empezar. El microcontrolador en el tablero está programado utilizando lenguaje de programación y entorno de desarrollo Arduino Arduino.
Módulo XBee: XBee es un pequeño transceptor de 2.4GHz con un microcontrolador pequeño a bordo. Es un protocolo de comunicación que se utiliza también en muchos otros instrumentos.
Hay dos tipos de transceptores de radio XBee:
serie 1 y serie 2. Cada serie tiene dos variedades: normal y pro. Mientras que la normal tiene un rango de 30 a 40 metros en situaciones de interiores o urbanos, a lo largo de la línea de la vista funciona hasta 100 o incluso 125 metros. El pro es eficaz hasta 1,6 km en línea de la vista. Sin embargo, con una antena de Yagi direccional, XBee pro puede llegar a tanto como 20km en línea de la vista.
Mientras que el serie 1 tiene ocho pines de I/O digitales, serie 2 tiene 11 pines. Serie 2 está más avanzada y se puede hacer en redes malladas, cuyo rango puede ampliarse a cualquier longitud poniendo router XBees en el medio.
Entrada analógica y XBee
Pines de entrada analógicas de XBee leer 0V a 1.2V máximo. Cualquier voltaje encima de 1.2V se trata como máximo o 1. Puesto que la mayoría XBees opera a 3, 3V, reducimos este voltaje a 1.2V agregando un resistor adecuado a lo largo de la unidad de entrada.
Supongamos que el sensor analógico es un LDR cuya impedancia varía de 0 a 10k, a 3, 3V a 1.2V a través de la LDR ponemos una resistencia 20 de k en serie con la LDR para que dos tercios voltaje (3.3V) cae antes de llegar a la LDR.
Lado del transmisor: Pernos 20 17 de XB1 están conectados con ajustes preestablecidos de cuatro 10 k (VR1 por VR4), que se utilizan para controlar motor de BLDC (ver Fig. 4), timón, alerón y elevador, respectivamente.
Lado del receptor: Los pines 0 y 1 de board1 están conectados al pin 2 y 3 de XB2. Pines 9, 11, 10 y 12 de la Junta están conectados para indicar pernos de M1 (ascensor), M2 (timón), M3 (alerones) servos y ESC módulo (consulte la Fig. 5), respectivamente. Partes del cuerpo principal de un avión RC típico se muestran en la figura 6.
Motor de BLDC se utiliza para la hélice de la aeronave. La hélice o hélice, convierte movimiento de rotación del motor a fuerza de propulsión. Es la parte más importante de la aeronave. El propulsor se monta en la parte delantera de la aeronave y se hace generalmente de dos o más módulos.
Se utiliza un timón para dirigir el avión cuando se mueve a través del aire, controlar la dirección en que apunta la aeronave. Es una lámina plana de material unida con bisagras a popa, cola de la nave, o después del final.
Un alerón es una superficie de control de vuelo con bisagras, generalmente está instalada en el borde posterior de cada ala de un avión. Alerones se utilizan en pares para controlar la aeronave en rodillo o movimiento alrededor del eje longitudinal del avión.
Son superficies de control, generalmente en la parte trasera de una aeronave, que controlan la altura longitudinal de la aeronave. La posición del ascensor controla si el morro del avión apunta hacia arriba o hacia abajo, y por consiguiente el avión se mueve hacia arriba o hacia abajo. Los ascensores son generalmente con bisagras a una superficie trasera fija o ajustable.
Entrada de cable del ESC está conectado a 11.1V batería. Tres cables de salida de salida están conectados a entradas de tres fases del motor de BLDC (M4).













