Paso 3: Construcción de pieza VersaBot-externo
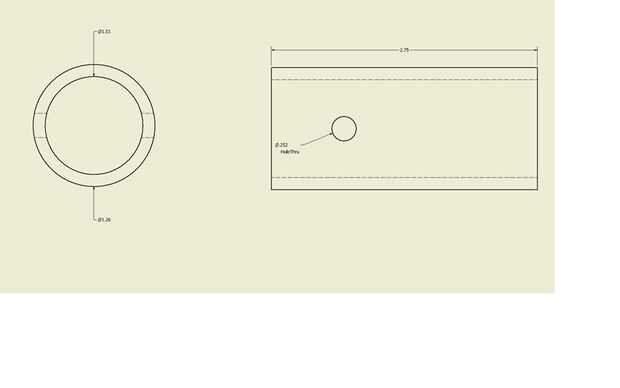








Tubo de eje de la rueda 1-B
1.) cilindro hueco con un diámetro interno del axel.
2.) cortar la longitud del cilindro a 2,75" en.
3.) luego trazar la distancia a su agujero en el tubo.
4.) taladro un agujero de ¼" por cada lado.
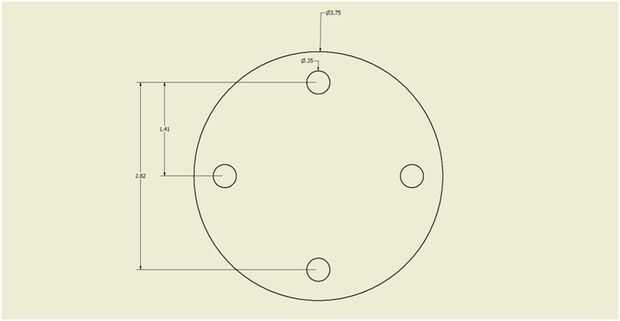
Hoja redonda 1-A
Bruto de 1.) corta la forma circular con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
3.) luego agujerear 23/64" los agujeros para que coincida con la rueda.
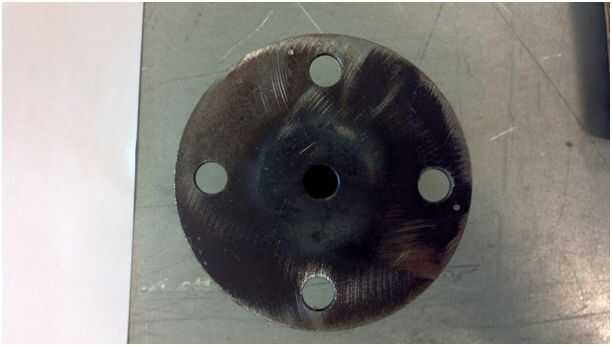
1-A del eje de rueda montado en derecho Axel 1-A y el neumático 1-A.
Tubo de eje de la rueda 1-B
1.) cilindro hueco con un diámetro interno del axel.
2.) cortar la longitud del cilindro a 2,75" en.
3.) luego trazar la distancia a su agujero en el tubo.
4.) taladro un agujero de ¼" por cada lado.
Hoja redonda 1-B
Bruto de 1.) corta la forma circular con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
3.) luego agujerear 23/64" los agujeros para que coincida con la rueda.
1-B del eje de rueda montado en la izquierda Axel 1 B y 1-B. neumático
12" neumáticos
Axel está conectado al cubo de la rueda.
8" ruedas giratorias
Dos de estos para la parte de atrás de las ruedas giratorias.
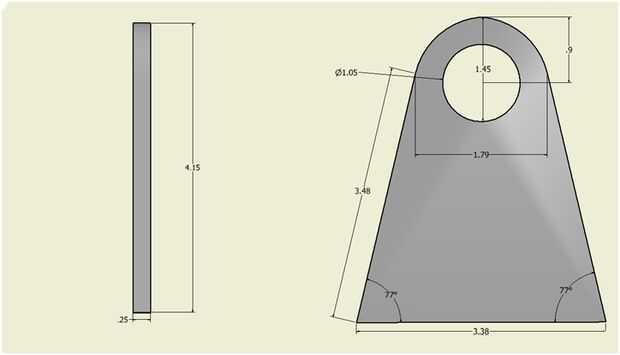
Z-3 de enganche de remolque
Bruto de 1.) corta la forma con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
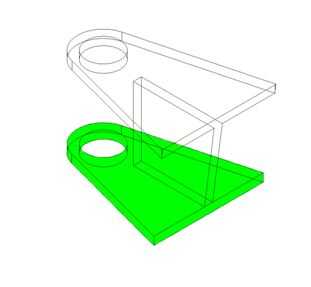
Trailer Hitch Z-2
Bruto de 1.) corta la forma con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
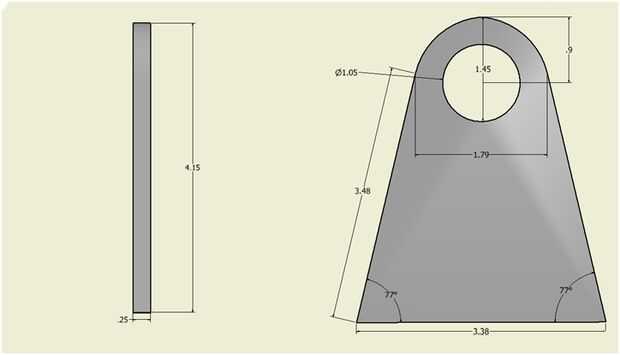
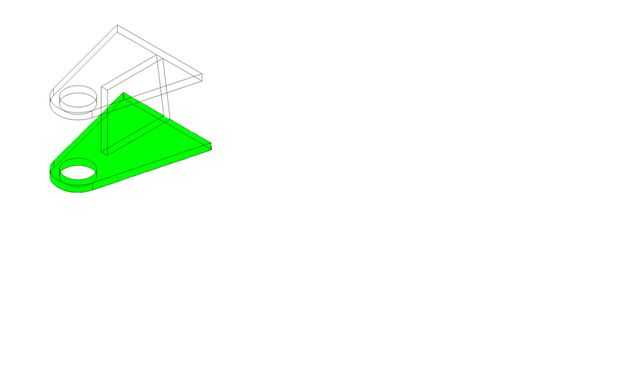
Trailer Hitch Z-1
Bruto de 1.) corta la forma con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
Trailer Hitch Z-2 pieza y Z-1 del acoplado.
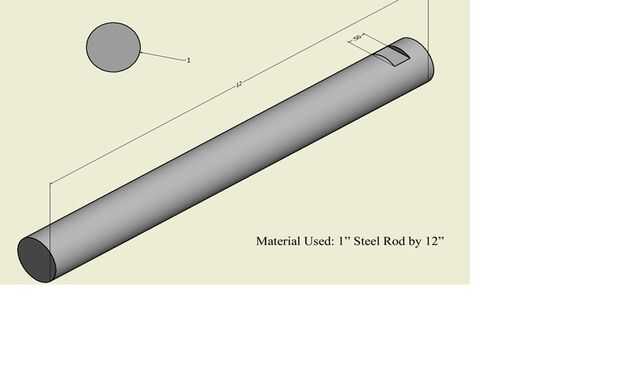
Axel 1-A
1.) 1" varillas de acero (diámetro necesita cerca de I.D. de Almohada rodamientos y cojinetes de Plaza).
2.) corte con una sierra Horizontal a una longitud de 12".
Axel B 1
1.) 1" varillas de acero (diámetro necesita cerca de I.D. de Almohada rodamientos y cojinetes de Plaza).
2.) corte con una sierra Horizontal a una longitud de 12".
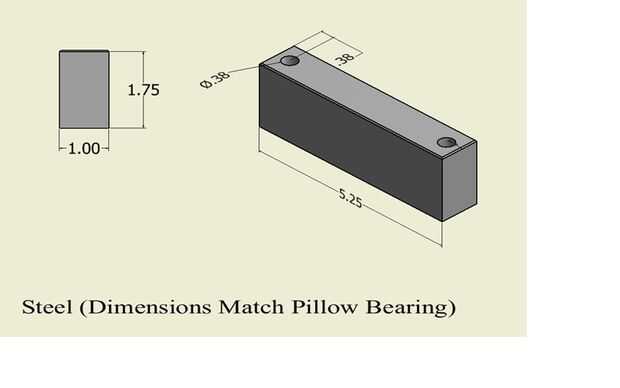
Cojín elevador 1-A
1.) medida de almohada rodamiento montaje Diámetro longitud y agujero.
2.) bloque de corte a las dimensiones del espejo.
3.) luego agujerear los agujeros.
Canalización vertical de la almohadilla 1-A para el eje del lado izquierdo.
Cojín elevador 1-B
1.) medida de almohada rodamiento montaje Diámetro longitud y agujero.
2.) bloque de corte a las dimensiones del espejo.
3.) luego agujerear los agujeros.
Canalización vertical de la almohadilla 1-A para el eje del lado izquierdo.
Ruedas de balance
Giratoria de ruedas
Estas monturas giratorias se unen a piezas de 1 A y 1-B refuerzo de neumáticos.
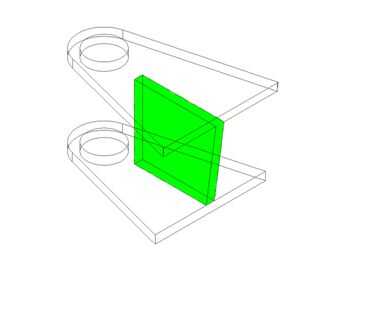
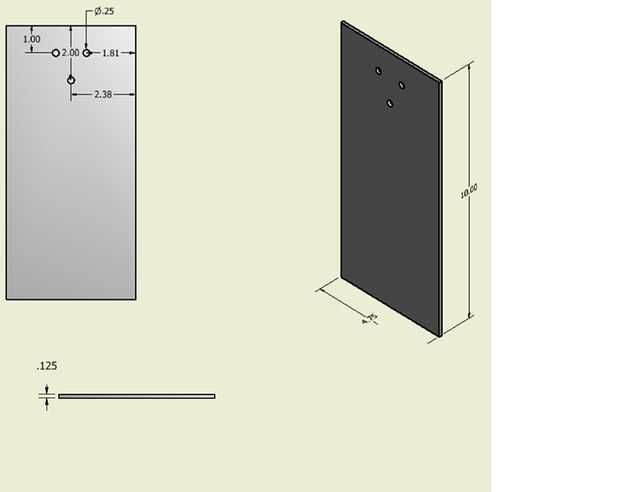
Refuerzo de neumáticos 1-A
Bruto de 1.) corta la forma rectangular con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
3.) luego agujerear los agujeros de 1/4 para que coincida con la monta de vuelta cero.
Triángulo de agujeros es unir a la Cruz de que apoya la rueda.
Los cuatro orificios más cercanos al triángulo soporte y ayudar a curva resistencia.
Refuerzo de neumáticos 1-B
Bruto de 1.) corta la forma rectangular con una sierra Vertical.
2.) luego limpiar bordes afilados o rebabas.
3.) luego agujerear los agujeros de 1/4 para que coincida con los montajes del eslabón giratorio.
Triángulo de agujeros es unir a la Cruz de que apoya la rueda.
Los cuatro orificios más cercanos al triángulo soporte y ayudar a curva resistencia.
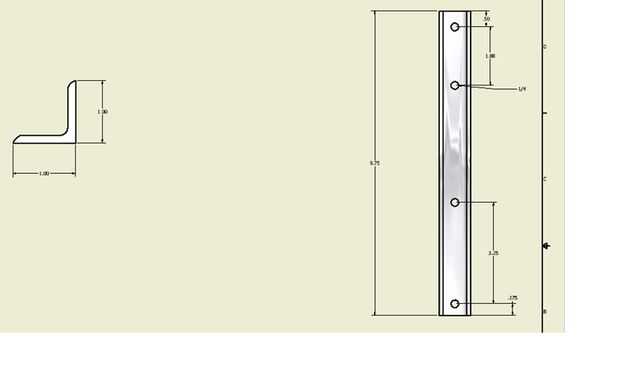
Neumático de arriostramiento lateral 1-A
1.) ángulo de corte recto a 9 ¾"
2.) taladro 1/4" agujeros en lugares. (Determinada por cero vuelta montaje y arriostramiento transversal de la rueda)
Neumático de arriostramiento lateral 1-B
1.) ángulo de corte recto a 9 ¾"
2.) taladro 1/4" agujeros en lugares. (Determinada por cero vuelta montaje y arriostramiento transversal de la rueda)
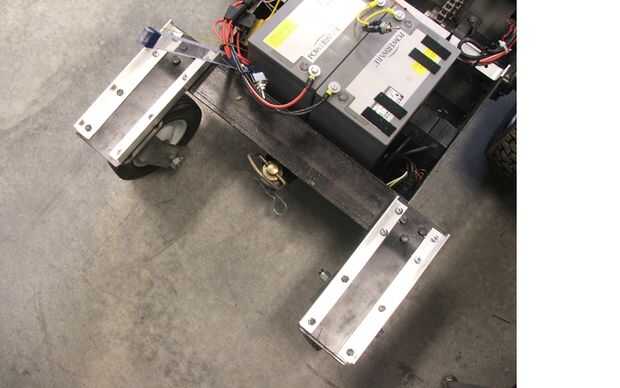
Refuerzo y refuerzo lateral montado neumáticos del neumático
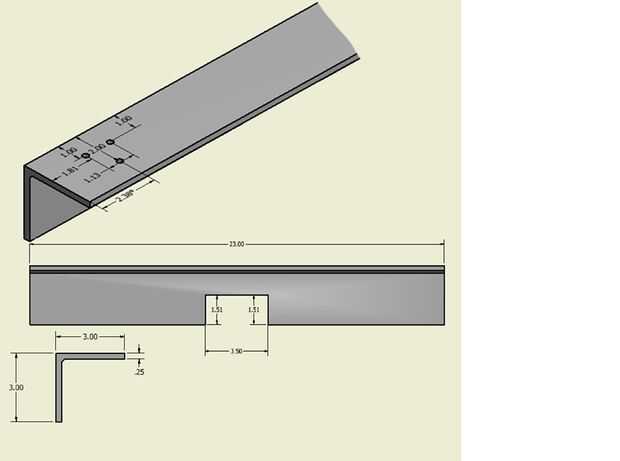
Rueda de refuerzo transversal
1.) corte 3 x 3" ángulo recto a 23" de largo.
2.) taladro 1/4" agujeros para que coincida con cero vuelta monta.
3.) ¼" agujeros para que coincida con el refuerzo del neumático y neumático arriostramiento lateral
4.) corte un agujero para dejar espacio para el enganche.

")






")
")



